可变电驱动作为节能手段
 由非调节式电驱动向调节式过渡是电驱动和电驱动技术领域节能的主要途径之一。
由非调节式电驱动向调节式过渡是电驱动和电驱动技术领域节能的主要途径之一。
通常,控制生产机械的电驱动器的速度或扭矩的需要由工艺过程的要求决定。例如,刀具的进给速度决定了车床上加工工件的清洁度,电梯速度的降低是小车停车前准确定位所必需的,卷绕轴扭矩的调整需要由保持受伤材料等的恒定张力的条件。
然而,有许多机制不需要根据工艺条件改变速度,或者使用影响工艺过程参数的其他(非电气)方法进行调节。
首先,它们包括用于移动固体、液体和气体产品的连续输送机构:输送机、风扇、风机、泵组。对于这些机构,目前通常使用未调节的异步电驱动器,其使工作体以恒定速度运动,而不管机构上的负载如何。在其部分负载下,恒速运行模式的特点是增加 单位能源消耗 与标称模式相比。
NSC 性能降低,输送机的效率降低,因为消耗功率的相对份额超过了空闲时刻。更经济的是变速模式,它提供相同的性能,但具有恒定的拉力分量。
在图。图 1 显示了对于负载移动速度恒定 (v — const) 和可调 (Fg = const) 的空转力矩 Mx = 0、ЗМв 的输送机,电机轴的功率依赖性。图中的阴影区域表示通过速度控制获得的能量节省。
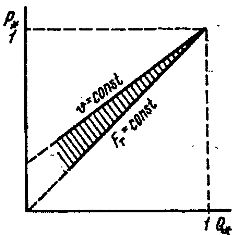
米。 1、电动机轴功率对输送机性能的依赖性
因此,如果输送机速度降低到标称值的 60%,则电机轴功率将比标称值降低 10%。调速效果越高,空转扭矩越大,对输送机性能的降低越明显。
通过欠载降低连续运输机构的速度可以让您以较低的单位能耗执行所需的工作量,即解决在移动产品的技术过程中降低能耗的纯经济问题。
通常,随着此类机制速度的降低,由于技术设备的操作特性的改进也会出现经济效应。因此,当速度降低时,输送机本体的磨损减少,管道和配件的使用寿命由于供应液体和气体的机器产生的压力降低而增加,并且这些产品的过量消耗也被消除。
事实证明,技术领域的效果往往比节能带来的效果要高得多,这就是为什么仅通过评估能源方面来决定是否为此类机构使用受控电力驱动器的可取性从根本上是错误的。
电铲机的速度控制。
用于液体和气体供应的离心机(风扇、泵、风扇、压缩机)是全国最有潜力显着降低特定能源消耗的主要通用工业机械。离心机构的特殊地位是由于它们的重量大、功率高,通常具有较长的运行模式。
这些情况决定了这些机制在国家能源平衡中的重要份额。水泵、风机和压缩机的驱动电机总装机容量约占所有发电厂容量的 20%,而仅风机一项就消耗了该国所有发电量的 10% 左右。
离心机构的运行特性以扬程 H 对流量 Q 和功率 P 对流量 Q 的依赖关系的形式呈现。在稳定运行模式下,离心机构产生的扬程通过以下方式平衡它输送液体或气体的水力或空气动力网络的压力。
泵的静态压力分量由用户和泵的高度之间的测地线差异决定;对于粉丝——自然的吸引力;对于风扇和压缩机——来自管网(储气罐)中的压缩气体压力。
泵的 Q-H 特性和网络的交点决定了参数 H-Hn 和 Q-Qn。以恒定速度运行的泵的流量 Q 的调节通常由出口处的阀门执行,并导致网络特性发生变化,因此流量 QA * <1 对应于与泵特性的交点。
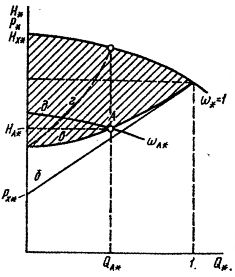
米。 2. 抽油机Q-H-特性
通过类比电路,调节通过阀门的流量类似于通过增加电路的电阻来控制电流。显然,从能量的角度来看,这种控制方法效率不高,因为它伴随着调节元件(电阻器、阀门)中的非生产性能量损失。阀门损失的特征在于图 1 中的阴影区域。 1.
与在电路中一样,调节能源而不是其用户更经济。在这种情况下,由于电源电压的降低,电路中的负载电流降低。在液压和空气动力学网络中,通过降低机构产生的压力获得类似的效果,这是通过降低其叶轮的速度来实现的。
当转速变化时,离心机构的工作特性按照相似定律变化,其形式为:Q * = ω *,H * = ω * 2,P * = ω * 3
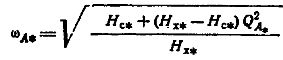
其特性曲线通过 A 点时的泵叶轮转速:
泵在调速过程中消耗的功率表达式为:

力矩与速度的二次相关性主要是风扇的特征,因为由自然推力确定的头部静态分量明显小于 Hx。在技术文献中,有时会使用力矩对速度的近似依赖性,这考虑到了离心机构的这一特性:
M* = ω * n
其中 n = 2 在 Hc = 0 且 nHc > 0。计算和实验表明 n = 2 — 5,其较大的值是压缩机在具有显着背压的网络中运行的特征。
对恒速和变速泵运行模式的分析表明,ω= const 时的额外能量消耗非常显着。例如,带参数的泵运行模式的计算结果如下所示:Hx * = 1.2; Px*= 0.3 在具有不同背压 Зс 的网络上:
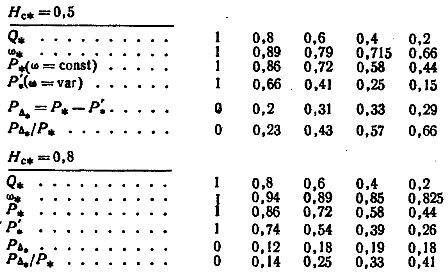
给定的数据表明,受控电驱动可以显着降低耗电量:在第一种情况下高达 66%,在第二种情况下高达 41%。在实践中,这种影响可能会更高,因为由于各种原因(阀门缺失或故障、手动启动),根本没有应用阀门调节,这不仅会导致电力消耗增加,而且还会在液压网络中付出过多的努力和成本。
上文已经讨论了常参数网络中单作用离心机构的能量问题。在实践中,离心机制并联运行,网络往往具有可变参数。例如,采矿网络的空气动力阻力随着墙壁长度的变化而变化,供水网络的流体动力阻力由用水方式决定,白天会发生变化等。
离心机构并联运行时,可能有两种情况:
1)所有机构的速度同时同步调节;
2)调节一个机构或部分机构的速度。
如果网络参数是常数,那么在第一种情况下,所有机制都可以被认为是一个等价物,所有上述关系都适用。在第二种情况下,机构未调节部分的压力对调节部分的影响与背压相同,并且非常显着,这就是为什么此处节电不超过标称功率的 10-15%机器的。
可变网络参数极大地复杂化了离心机制与网络协作的分析。在这种情况下,受控电驱动器的能量效率可以以区域的形式确定,其边界对应于网络参数的极限值和离心机构的速度。
另请参阅此主题: 用于泵装置的 VLT AQUA Drive 变频器