数字设备:触发器、比较器和寄存器
 数字设备建立在逻辑元素之上,因此它们遵循逻辑代数法则。数字技术的基本设备以及逻辑设备都是触发器。
数字设备建立在逻辑元素之上,因此它们遵循逻辑代数法则。数字技术的基本设备以及逻辑设备都是触发器。
触发器(英文trigger——trigger)——一种电子设备,具有两种稳定状态,在外来脉冲的影响下能从一种状态跳到另一种状态。
触发器,或者更准确地说,触发器系统被称为一大类电子设备,它们能够长时间保持在两种稳定状态中的一种状态,并在外部信号的影响下交替出现。每个触发条件都可以通过输出电压值轻松识别。
每个触发状态对应于某个(高或低)输出电压电平:
1) 触发器设置为一种状态——级别 «1»。
2) 触发器复位——输出端为 «0» 电平。
只要需要,稳定状态就会保持,并且可以通过外部脉冲或通过关闭电源电压来改变。澈。触发器是一种基本存储元件,能够存储最小的信息单位(一位)«0» 或 «1»。
触发器可以构建在分立元件、逻辑元件、集成电路上或者是集成电路的一部分。
触发器的主要类型包括:RS-、D-、T-、JK-触发器……此外,触发器还分为异步和同步。在异步驱动中,从一种状态到另一种状态的切换是在信号到达信息输入时直接完成的。除了数据输入外,同步触发器还有一个时钟输入。它们的切换仅在存在使能时钟脉冲时发生。
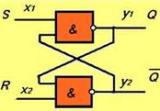
RS 触发器至少有两个输入:S(设置 - 设置)- 触发器设置为电平状态 «1» 和 R(重置)- 触发器重置为电平状态 «0»。 (图。1)。
在输入 C 存在的情况下,触发器是同步的 - 触发器的切换(输出状态的改变)只能在同步(同步)脉冲到达输入 C 的时刻发生。

图 1 — RS 触发器的传统图形表示和结论的目的 a) 异步,b) 同步
触发器除了正向输出外,还可以有反相输出,输出的信号是相反的。
表 1 显示了触发器在操作期间可以呈现的状态。该表显示了输入信号S和R在某一时刻tn的值以及触发器(直接输出的)在下一个时刻tn+1到达后的下一时刻的状态脉冲。新的触发状态也受 Q n 先前状态的影响。
澈。如果需要写入触发器 «1» — 我们向 S 输入发送一个脉冲,如果 «0» — 我们向 R 输入发送一个脉冲。
S = 1, R = 1 的组合是禁止组合,因为无法预测输出端将建立什么状态。
表 1 - 同步 RS 触发器状态表

还可以使用时序图(图 2)查看触发器的操作。
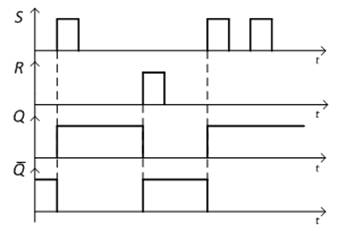
图 2 — 异步 RS 触发器的时序图
D-trigger(来自英文delay——延迟)有一个信息输入和一个时钟(同步)输入(图3)。
D 触发器在输出 Q 处存储时钟脉冲 C 到达时数据输入 D 处的信号。触发器存储 C = 1 时写入的信息。
表 2-D 触发器的状态表

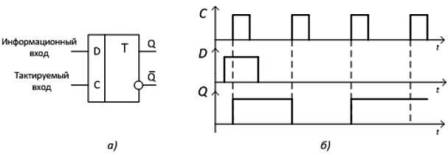
图 3 — D 触发器:a) 常规图形表示,b) 操作时序图
T 型触发器(来自英语 tumble——翻转、翻筋斗),也称为计数触发器,具有一个信息输入 T。T 型输入(计数输入)的每个脉冲(脉冲衰减)都会将触发器切换到相反的状态。
图 4 显示了 T 触发符号体系 (a) 和操作时序图 (b)。
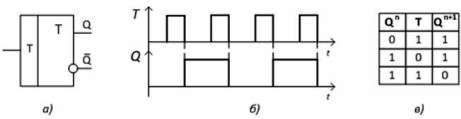
图 4-T 触发器 a) 常规图形符号,b) 操作时序图 c) 状态表
一个 JK 触发器(来自英文 jump—jump,keer—hold)有两个数据输入 J 和 K 以及一个时钟输入 C。引脚 J 和 K 的分配类似于引脚 R 和 S 的分配,但是触发器具有没有禁止的组合。如果 J = K = 1,它会将其状态更改为相反的状态(图 5)。
通过适当连接输入,触发器可以执行 RS-、D-、T-触发器的功能,即是一个通用触发器。
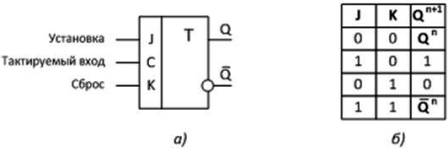
图 5 -JK -触发器 a) 常规图形符号,b) 缩写状态表
比较器(比较 — 比较)——一种比较两个电压的设备——输入 Uin 与参考 Uref。参考电压是一个恒定电压,有正极性或负极性,输入电压随时间变化。基于运算放大器的最简单的比较器电路如图 6 所示。如果 Uin Uop 在输出 U — us(图 6,b)。
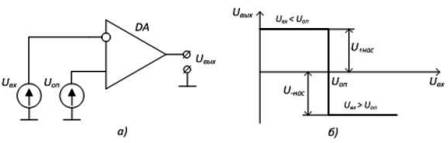
图 6 — 运算放大器比较器:a) 最简单的方案 b) 性能特征
正反馈比较器称为施密特触发器。如果比较器在相同电压下从 «1» 切换到 «0»,反之亦然,则施密特触发器 - 在不同电压下。参考电压创建一个 PIC 电路 R1R2,输入信号被馈送到运算放大器的反相输入端。图 7,b,显示了施密特触发器的传输特性。
在 OS 库存输入处的负电压 Uout = U + sat。这意味着正电压作用于同相输入。随着输入电压的增加,电流Uin > Uneinv。 (Uav — 触发器)比较器进入状态 Uout = U -sat。负电压施加到非反相输入。因此,随着 Uin < Uneinv 时刻输入电压的降低。 (Uav — 触发器)比较器进入状态 Uout = U + sat。
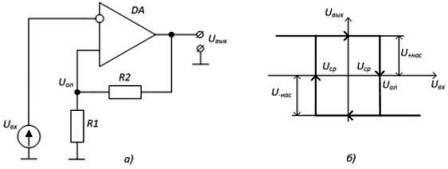
图 7 — 运算放大器的施密特操作:a) 最简单的方案 b) 性能特征
一个例子。图 8 显示了用于控制电动机的继电器接触器的示意图,允许电动机启动、停止和反转。
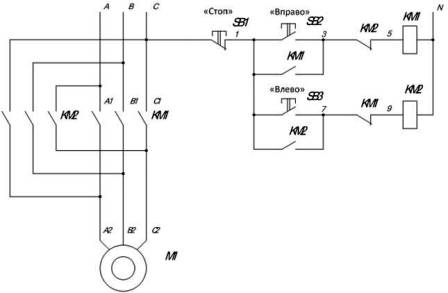
图 8 — 继电器接触器电机控制方案
电动机的换向由磁力启动器 KM1、KM2 执行。自由闭合触点 KM1、KM2 可防止磁力启动器同时运行。自由断开触点KM1、KM2提供按钮SB2、SB3的自锁功能。
为了提高运行的可靠性,需要用使用半导体器件和器件的非接触系统来代替继电器-接触器控制电路和电源电路。
图 9 显示了一个非接触式电机控制电路。
磁力启动器的电源触点已更换为光敏电阻:KM1-VS1-VS3、KM2-VS4-VS6。使用光敏电阻可以将低电流控制电路与强大的电源电路隔离开来。
触发器提供自锁按钮SB2、SB3。逻辑元件 AND 确保同时激活其中一个磁启动器。
三极管VT1导通时,电流流过第一组光敏电阻VS1-VS3的发光二极管,从而保证电流流过电机绕组,三极管VT2的导通为第二组光敏电阻VS4供电-VS6,确保电动机沿另一个方向旋转。
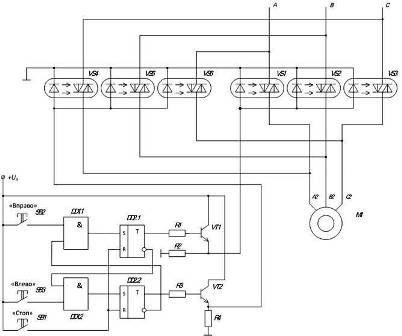
图 9 — 非接触式电机控制电路
寄存器——一种设计用于短期存储和转换多位二进制数的电子设备。寄存器由触发器组成,触发器的数量决定了寄存器可以存储二进制数的多少位——寄存器的大小(图 10,a)。逻辑元素可用于组织触发器的操作。
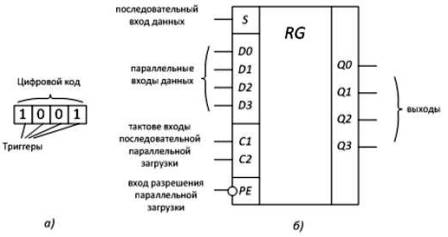
图 10 — 寄存器:a) 一般表示,b) 常规图形符号
根据输入和输出信息的方式,寄存器分为并行和串行。
在顺序寄存器中,触发器串联连接,即前一个触发器的输出将信息传递到下一个触发器的输入。触发器时钟输入 C 并联连接。这样的寄存器有一个数据输入和一个控制输入——时钟输入 C。
并行寄存器同时写入有四个数据输入的触发器。
图 10 显示了一个四位并行-串行寄存器的 UGO 和引脚分配。