电梯电气设备
 电梯是为垂直提升人和货物而设计的循环升降机械。按预约方式,电梯分为客用、载货、医用、载货。
电梯是为垂直提升人和货物而设计的循环升降机械。按预约方式,电梯分为客用、载货、医用、载货。
根据轿厢的运行速度,电梯分为低速(最高0.71米/秒)、高速(1-1.6米/秒)、高速(2-4米/秒)和高速(4 — 10 m / s)......乘客电梯的负载能力为 320 至 1600 公斤,货运电梯为 160-5000 公斤。在速度高达 1.6 米/秒时,电动机通过变速箱连接到牵引梁,如果速度更高,则使用无齿轮电力驱动。

客货电梯的设计方案多种多样,其主要装置有提升机、钢丝绳、轿厢、对重、机械制动器和控制设备。现代电梯具有配重悬挂系统和配重绳索。

机舱沿着垂直轨道移动。驾驶室悬挂在环绕牵引线的绳索上,并引导电动绞盘驱动器的滑轮。在绳索的末端有一个配重沿着导轨移动。配重质量等于机舱质量和 (0.42 - 0.5) 负载质量(或最可能的机舱负载的一半)之和。
电梯驱动
在电梯和货运电梯中,电力驱动器的类型根据移动速度、建筑物的楼层数和所需的制动精度来选择。目前正在使用以下电力驱动装置:
a) 17层以下的建筑物,使用速度为0.7~1.4m/s、载重量为320、400kg的低速和高速电梯。这些电梯使用带有鼠笼转子的异步双速电动机的电驱动器,
b) 对于速度为 1.6 m / s 的高速乘客电梯,用于高达 25 层的建筑物,根据晶闸管稳压器系统 (TRN) 的电力驱动器和双速异步电机 (TRN-ADD )用来。

可调电驱动器的存在确保了加速和减速过程的高度平稳性、停在地板上的高精度(高达 20 毫米)以及停止前没有速度降低的部分。电机二次绕组用于检修时实现低速,
c) 高速、高速电梯采用按晶闸管变流器-TP-D电机系统的恒电驱动和按变频器-短路异步电动机GGCH-AD系统的交流电驱动。
ULMP-25-16 型电梯的晶闸管电驱动器
电驱动器(图 1)的电源由启动和匀速运动时的可逆晶闸管稳压器 UZ (TRN) 和根据单相桥式电路 UZ1 组装的独立整流器为驱动器供电动态制动期间的定子绕组。
该系统提供鼠笼式感应电机转速的参数相位控制。自动控制系统采用KR1816VB031型单片机,对两速异步电动机的转速进行直接数字控制。
自动控制系统确保保持设定速度的高精度,并在所需楼层直接停到设定点,没有减速段。电机的次级绕组只有在检修时才导通。
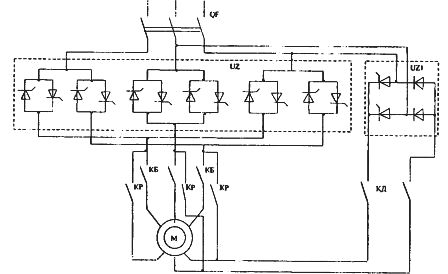
米。一、电梯晶闸管电驱动方案
制动电磁阀
电梯的起升机构装有专用的短行程和短行程直流电磁铁制动装置,通过整流器接入220或380V电网。
电梯控制装置
专为切换运动控制电路而设计的楼层开关。它们记录汽车的位置,自动选择运动方向(“向上”或“向下”),并在制动时发出关闭电力驱动的命令。在结构上,这些是三位置 (1-0-2) 三点杠杆开关(运动控制装置),具有可移动(在杠杆上)到固定(在身体上)的触点。
地板开关安装在地板水平的竖井中,驾驶室中有一个模制分支作用于地板开关杆。
当机舱通过转动杠杆“向上”移动时,一组固定触点闭合,“向下” - 另一组。当轿厢位于楼层时,楼层开关处于中性位置 «O»,固定触点打开。

速度开关的设计目的是在停止车辆之前提供降低速度的冲动。它们用于具有两个速度执行的电力驱动的高速电梯。它们基于楼层开关的原理构建,但设计不同。速度开关成套安装在矿井内,距离地面上下0.5~0.6m。
杠杆开关设计用于操作受控货运电梯。在结构上,这些是三位杠杆开关,手柄可自动返回到中性位置(“顶部”-0-“底部”),安装在机舱内。通过转动手柄,选择运动方向,这是通过闭合一对固定触点实现的。松开手柄时,触点打开,电机停止(关闭)。这些开关同时用作驾驶室末端位置的限位开关。这是通过杠杆作用在矿井中特殊导轨的滚轮上实现的。
设计用于高速电梯的电感式传感器。这种交流和整流电流传感器的示意图如图 1 所示。 2.
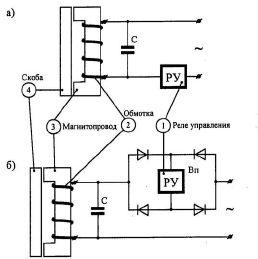
米。 2.交流(a)和整流(b)电流电感式传感器示意图
矿井内装有用钢材3制成的U型叠片磁路,机舱上有钢材支架4,为磁分流器。在磁路上有一个带有绕组 2 的线圈,控制继电器 1 直接或通过 Vp 整流器连接到该线圈。当夹子离开时(磁路打开),线圈的感应电阻很小,这将保证控制继电器的动作。如果钢支架与磁路重叠,线圈的感应电阻急剧上升,继电器释放。
通过包含与线圈并联的电容 C 来确保控制继电器操作的可靠性和清晰度,该电容 C 是根据获得接近电流谐振模式的条件选择的。使用整流器为控制继电器供电增加了继电器磁系统操作的可靠性。
此外,密封接触装置(簧片开关)广泛用于行程传感器。电感式传感器的使用消除了楼层开关和速度开关因接触装置操作而产生的噪声和无线电干扰等缺点。
磁层是安装在舱内,控制矿井门锁运行的电磁装置。磁分支限制器连接到分支电磁铁的衔铁。当驾驶室在地板上时,分支电磁铁排气,弹簧加载的制动器使矿井门锁闩脱离,使其打开。
移动时,支路电磁铁通电——插销引入,禁止开门。这种锁用于具有手动竖井门操作的旧设计(或现代化)的电梯。

电梯自动化
升降机和提升机运行的主要区别在于它们的多位置位置,表现为机构可以占据大量的固定位置。因此,在每次停止之后,有必要解决选择下一步的逻辑问题。这个问题的解决方案目前是使用逻辑芯片和微处理器来实现的。电梯控制方案设置如下任务:控制轿厢在井道中的位置、自动选择运动方向、确定停站开始时间、轿厢准确停在楼层、自动开门门的关闭以及电力驱动和电梯的保护。
设定小车运动程序的指令信号分为两种:来自小车的“命令”和来自停机坪的“呼叫”。命令通过分别位于驾驶舱和地板区域的按钮发出。根据对命令的响应及其处理方法,单独和集体控制方案会有所不同。使用单独的控制原理,电路仅感知和执行一个命令,并且在其执行期间不响应其他命令和调用。
该方案实施起来最简单,但限制了电梯的可能特性,因此仅用于9层以下、客流量相对较小的住宅楼的电梯。采用集中控制原理,电路同时接收多个指令,并按一定的顺序执行,通常按楼层顺序执行。

电梯控制系统的基础是楼层时钟测量。时钟的研究可以是一个钟摆,当固定在两个方向上进行时,从下向上和从上向下,以及在一个方向上,例如,仅从上向下。摆锤摆动使用较多。