感应电动机的机械特性
 电机的机械特性称为转子转速对轴力矩的依赖性 n = f (M2)... 由于在负载下空转力矩很小,则 M2 ≈ M 机械特性由依赖性 n 表示= f (M)... 由于考虑了关系 s = (n1 - n) / n1,因此可以通过在坐标 n 和 M 中呈现其图形相关性来获得机械特性(图 1)。
电机的机械特性称为转子转速对轴力矩的依赖性 n = f (M2)... 由于在负载下空转力矩很小,则 M2 ≈ M 机械特性由依赖性 n 表示= f (M)... 由于考虑了关系 s = (n1 - n) / n1,因此可以通过在坐标 n 和 M 中呈现其图形相关性来获得机械特性(图 1)。
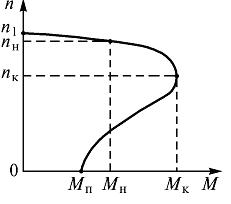
米。 1.感应电动机的机械特性
 异步电动机的自然机械特性对应于其包含的基本(护照)方案和电源电压的标称参数。如果包含附加元件,则可以获得人工特性:电阻器、电抗器、电容器。当电机以标称电压供电时,特性也不同于自然机械特性。
异步电动机的自然机械特性对应于其包含的基本(护照)方案和电源电压的标称参数。如果包含附加元件,则可以获得人工特性:电阻器、电抗器、电容器。当电机以标称电压供电时,特性也不同于自然机械特性。
机械特性是一种非常方便且有用的工具,可用于分析电力驱动器的静态和动态模式。
计算感应电动机机械特性的例子
三相鼠笼式感应电机由电压 = 380 V、频率 = 50 Hz 的网络供电。发动机参数:Pn=14kW,нn=960rpm,cosφн=0.85,ηн=0.88,最大扭矩的倍数km=1.8。
确定:额定定子绕组相电流、极对数、额定滑差、额定轴扭矩、临界扭矩、临界滑差并构建电机的机械特性。
回答。网络消耗的标称功率
P1n =Pn / ηn = 14 / 0.88 = 16 kW。
网络消耗的标称电流

极对数
p = 60 f / n1 = 60 x 50/1000 = 3,
其中 n1 = 1000 — 最接近标称频率的同步速度 - n = 960 rpm。
标称滑差
сн = (n1 — нн) / n1 = (1000 — 960 ) / 1000 = 0.04
额定电机轴扭矩
关键时刻
Mk = km x Mn = 1.8 x 139.3 = 250.7 N•m。
我们通过代入 M = Mn、s = sn 和 Mk / Mn = km 找到临界滑移。

绘制发动机的机械特性,用n=(n1—s)确定特征点:怠速点s=0,n=1000rpm,M=0,标称模态点сn=0.04,нn=960rpm,Mn= 139.3 N • m 和临界模式点 сk = 0.132,нk = 868 rpm,Mk = 250.7 N • m。
对于 n = 1、n = 0 的驱动点,我们发现
在获得的数据的基础上,构建了机械特性发动机。为了更准确地构造机械特性,有必要增加设计点的数量并确定给定滑块的力矩和旋转频率。
