编码器——旋转角度传感器
 使用外观简单的设备——编码器(或换句话说,角度传感器)来定位各种类型的工业设备。
使用外观简单的设备——编码器(或换句话说,角度传感器)来定位各种类型的工业设备。
编码器用于将线性或旋转运动转换为二进制数字信号。编码器是一种装置,其轴连接到被研究物体的旋转轴上,并提供对后者旋转角度的电子控制。根据工作原理,编码器分为光学式和磁性式。
在光学编码器的轴上有一个圆盘,圆盘周围有间歇窗口,靠着圆盘有一个 LED 和一个光电晶体管,确保以以下形式形成输出信号 矩形脉冲序列 频率与窗口数量和磁盘/轴的转速成正比。脉冲数表示旋转角度。
光学编码器可用作增量编码器和绝对编码器。
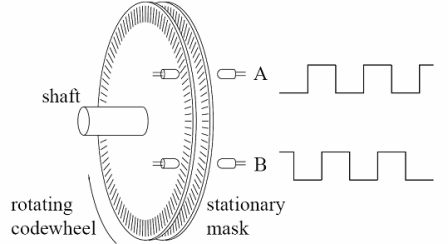
增量式编码器有一个间歇圆盘,圆盘上有许多与基半径大小相同的窗口和两个读数 光电耦合器,它允许您固定轴的旋转角度和旋转方向。在圆盘的额外半径上,有一个单独的中断窗口和一个相应的光耦合器,用于定义起始位置(原点)。
负扭矩 - 增量编码器提供旋转角度的相对读数,旋转停止时不会保存相关信息。它们的优点包括在高分辨率和高工作频率下设计简单(因此成本低)。
具有更高耐用性的增量式编码器专注于工业应用 - 机械工程、轧机、造船、纺织、鞋类、木工。对于此类编码器,决定性参数是旋转角度的分辨率、高频工作能力、承受恶劣环境条件的高度保护。
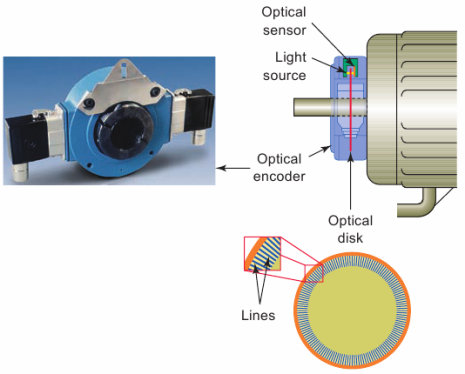
带有线条或凹口的圆盘会中断到达光学传感器的光束。电子电路检测光束断裂并从编码器生成数字输出脉冲。
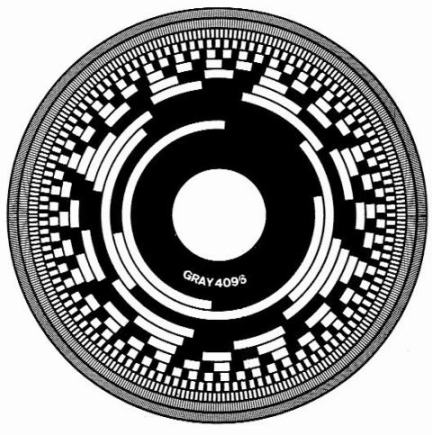
编码盘——一种将轴的角位移转换成数字形式的装置。数字代码的几何图像被应用到编码盘上。码位符号应用在同心轨道上,最低有效位(次要有效位)位于更靠近外围的位置。
根据条码的读取方式(接触式、光电式、电磁式、感应式、静电式等),条码的几何图像有导电与电绝缘、透明与不透明、磁性与非磁性等。
最普遍的是使用各种二进制代码对磁盘进行编码,这排除了跨越单独离散部分的边界时发生错误的情况,此时可以在边界的一侧读取某些位,而在另一侧读取一些位(由于安装不准确)可移动设备或由于磁盘旋转时非同时读取代码这些代码包括所谓的 Fau 代码(Barker 代码)和 Reflex 代码(Grey 代码)。
一些光学旋转编码器使用反射编码器盘。该圆盘具有吸收或反射光的交替部分,并且光源和接收器位于圆盘的一侧。如果只有一个光源和接收器,来自传感器的脉冲序列可以让您找出圆盘相对于其先前位置旋转了多少步。
传感器无法判断旋转方向,但如果添加第二对源-接收器,与第一个相位差 90°,则微控制器将能够通过两者之间的相位差确定磁盘的旋转方向脉冲序列。
应该记住,任何检测磁盘相对旋转但不能测量其绝对角位置的系统都是增量编码器。
绝对编码器有一个不连续的圆盘,带有不同半径的同心窗口,其相对大小由二进制代码确定并同时读取,为每个角位置(格雷码,二进制代码......)提供编码输出信号。
在这种情况下,可以在没有数字计数器的情况下获得轴的瞬时位置数据或返回初始位置,因为输出有一个编码字 — «n 位»,不受电气噪声的影响。
绝对式编码器用于需要长期存储输入数据的应用,但设计较为复杂,价格也较高。
带有现场总线接口的绝对值编码器有一个用于现场总线通信的输出接口,符合 CANopen、ProfiBus、DeviceNet、以太网、InterBus 标准,并使用二进制代码确定旋转角度。上述通信接口可根据许多参数进行编程:例如旋转方向、每转脉冲分辨率、波特率。

安装在电机轴上的编码器有效地提供了精确的定位控制。这种编码器通常以“孔”版本生产,特殊联轴器是其设计的重要元素,可以补偿电机轴的间隙。
在上述条件下定位最有效地提供了一种磁编码器,其中轴的角位移转换为电子信号是基于霍尔效应以非接触方式进行的,与内部光斩波器的旋转无关传感器并允许以高达 60,000 rpm 的速度进行信号处理。
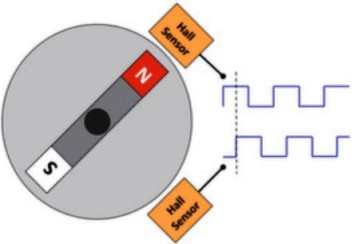
在磁性编码器中,其上固定有永磁体的外轴的高速旋转由结合在单半导体晶体上的霍尔传感器和信号处理控制器来感测。
当永磁体的两极在微电路上旋转时 霍尔传感器 可变磁感应矢量感应霍尔电压,其中包含有关轴旋转角度瞬时值的信息。微控制器提供霍尔电压到定位角度参数的快速转换。

这种转换无需磁铁和霍尔传感器元件直接机械连接的可能性是磁性编码器的主要优势,为它们提供了高可靠性和耐用性,并使其能够在与工业自动化、印刷、金属加工相关的高速应用中高效工作,测量和测量设备。