机器人和机器人设备——术语和定义
机器人: 具有两个或多个可编程移动度的执行设备,具有一定程度的自主性,能够在外部环境中移动以执行分配的任务。
机器人装置: 一种具有工业或服务机器人属性的执行设备,但不具备所需数量的可编程运动度数或一定程度的自主性。
GOST R 60.0.3.1-2016 机器人和机器人设备。测试类型
机器人: 一种驱动机构,可在两个或多个轴上编程,具有一定程度的自主性,在其工作环境中移动并按预期执行任务。
注1:机器人包括一个控制系统和一个控制系统接口。
注 2 机器人分为工业机器人和服务机器人是根据它们的用途来划分的。
机器人装置: 具有工业机器人或服务机器人特性的执行器。它可能具有不可编程的轴或自主性不足。
示例放大器;遥控装置;二轴工业机械手。
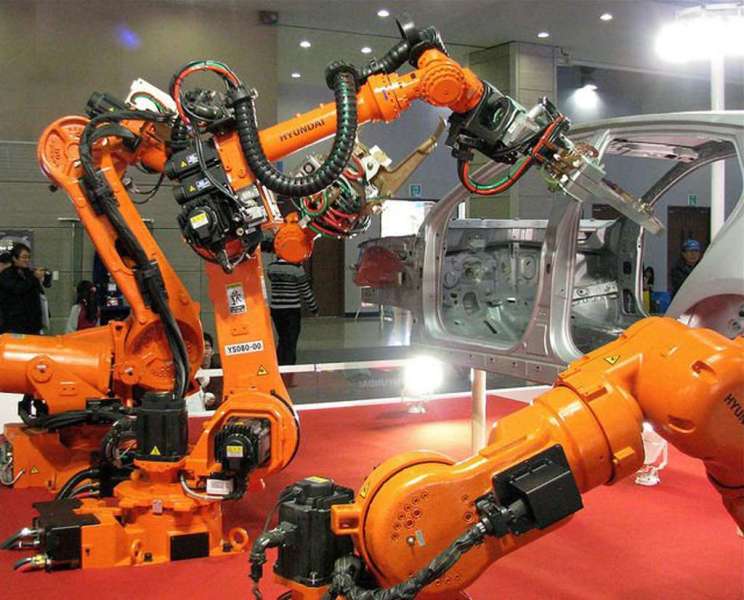
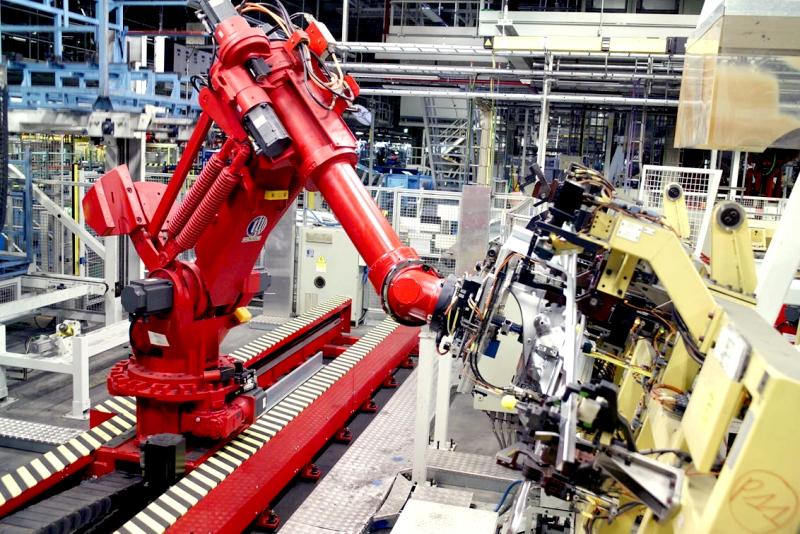
工业机器人: 一种自动控制、可重新编程的多功能机械手,可在三个或更多轴上进行编程。它可以固定在预定位置,也可以移动以执行工业自动化任务。
注 1 — 工业机器人包括: — 操纵器,包括执行器; — 控制器包括用于吊坠和通信接口的吊坠(电子和软件)。
注 2:该对象可能有额外的集成轴。
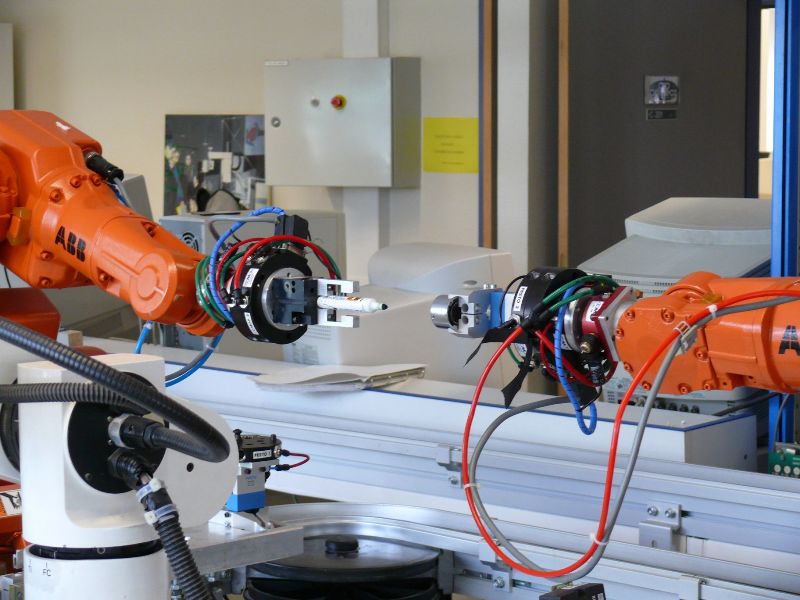
机器人系统: 包括机器人、机器人工作部件以及支持机器人运行的机器、设备、装置和传感器的系统。
工业机器人系统: 由工业机器人、工作体、机器、设备、装置、外部辅助轴和支持机器人运行的传感器组成的系统。
GOST R ISO 8373-2014 机器人和机器人设备。术语和定义
工业机器人
一种固定或移动的自动机器,由具有多个移动度的机械手形式的执行设备和可重新编程的程序控制设备组成,以在生产过程中执行电机和控制功能。
注意:重新编程是工业机器人的特性,可以自动或在操作员的帮助下替换控制程序。重新编程涉及使用控制设备的遥控器的控制,根据移动性和控制功能的程度改变位移的顺序和(或)值。
国家标准 25686-85。机械手、汽车操作员和工业机器人。术语和定义(第 1 号修正案)
机器人技术是基础科学和应用科学的一个分支,涉及自动和自动化技术系统(机器人)的设计、生产和应用。机器人是一种专门设计的、可重新编程的机械设备,无需人工协助即可运行。
贾斯汀·J。 Beyond BASIC Face-off // PC Tech Journal。 — 1987 年 9 月。 — P. 136. —(由 B.H. Lopukhov 翻译)。
信息图表机器人:
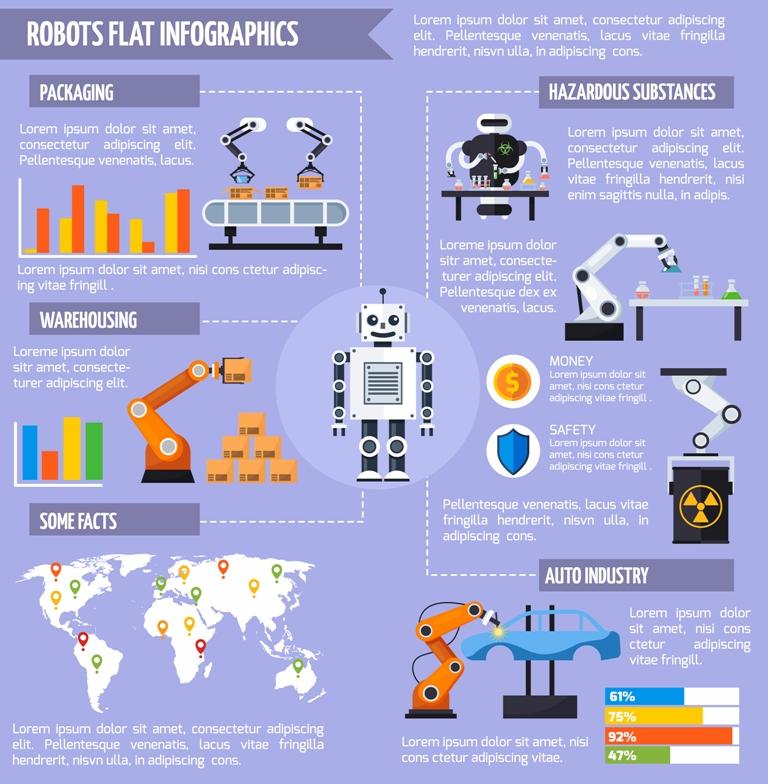
当它出现在现代机器人技术中时,机器人被定义为一种自动机器,用于执行类似于人类进行体力劳动的机械动作。最重要的是,在困难和危险的工作中取代人的愿望催生了机器人的想法。然而,在现代机器人技术中,机器人的定义必须大大扩展,因为机器人已经超过了人类的一般尺寸。现代机器人技术的主题是整个生活世界中物体的技术类比,当然也包括人。
Yurevich E. I. 机器人学基础:一项调查。津贴。 — 第 4 版,修订。并添加— SPb.:BHV-圣彼得堡,2018 年。
“机器人”一词起源于斯拉夫语。它是由著名作家卡雷尔·恰佩克在剧作《R.U.R.》中介绍的(罗森通用机器人)。这个词是以设计用来代替人类从事繁重体力劳动的机械机器人命名的。技术术语“工业机器人”出现于 20 世纪 70 年代。然而,我们可以假设机器人技术的根源可以追溯到远古时代,当时人们首次尝试创造人形设备、可移动的崇拜人物、机械仆人。
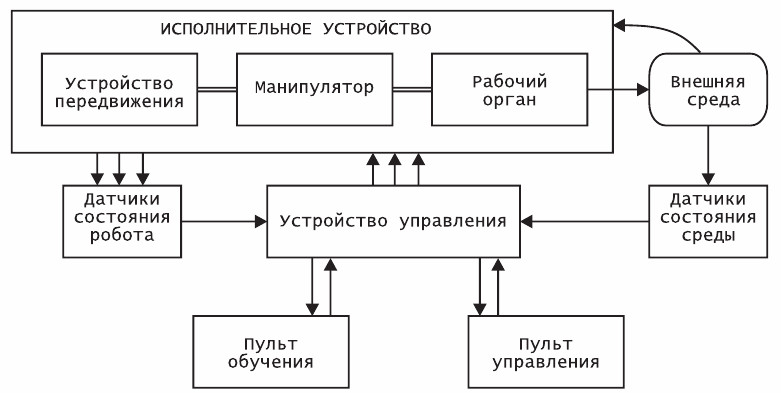
机器人是一种技术综合体,旨在执行人类固有的各种动作和某些智能功能。机器人配备了必要的执行装置、控制和信息系统,以及解决计算和逻辑任务的工具。机器人的主要部件是操纵机构和自动控制系统,包括微型计算机或一组微处理器,在某些情况下还包括传感器装置。
工业机器人结构图:
Bulgakov A. G.,Vorobiev V. A. 工业机器人。运动学、动力学、控制和管理。工程图书馆系列。 — M.:梭伦出版社,2008 年。
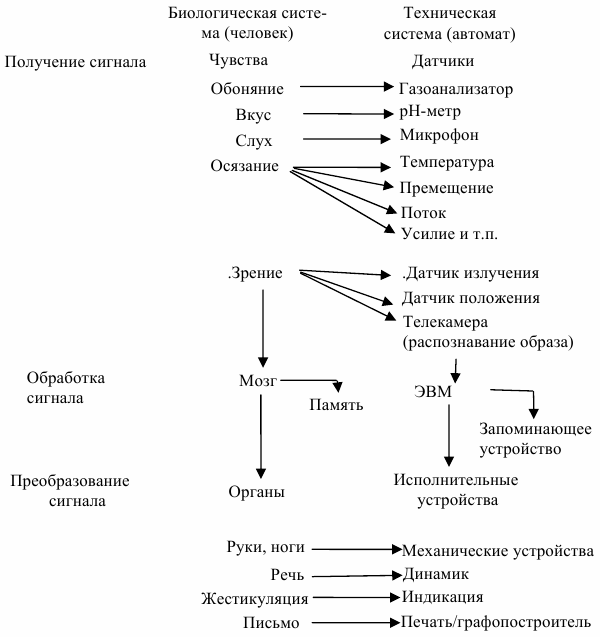 生物和技术系统(人和机器人)中信号的接收、处理和转换过程之间的类比
生物和技术系统(人和机器人)中信号的接收、处理和转换过程之间的类比
机器人法则
1. 机器人不得伤害人,或因不作为而使人受到伤害。
2. 机器人必须服从人的所有命令,除非这些命令与第一定律相冲突。
3. 机器人必须在不违反第一和第二定律的范围内注意自身的安全。
艾萨克·阿西莫夫,1965 年
关于这个主题的文章: