输送机驱动链
 本文研究了一些输送机的电力驱动方案。在图。图 1 显示了各个输送线的电力驱动示意图,其速度必须严格相同。这种需求出现在连续生产中,当不同的产品在不同的生产线上进行必要的技术操作后,必须严格按照彼此的要求在装配现场相遇。
本文研究了一些输送机的电力驱动方案。在图。图 1 显示了各个输送线的电力驱动示意图,其速度必须严格相同。这种需求出现在连续生产中,当不同的产品在不同的生产线上进行必要的技术操作后,必须严格按照彼此的要求在装配现场相遇。
该方案允许您同时启动和停止多条输送线并调整它们的速度。协调运动是通过使用普通逆变器变频器根据同步轴方案切换电机来实现的。电机 D1 和 D2 的速度控制是通过使用变速比齿轮箱 P 改变逆变器的速度来完成的。
启动输送机的许可由监控最关键区域输送机运行的操作员授予。当按下准备按钮 G1 和 G2 时,信号灯 LS1 和 LS2 点亮,继电器 RG1 和 RG2 被激活。后者为启动 RP 准备继电器。
当您按下启动按钮时,RP 被触发,从而打开接触器 L1。逆变器位置 D1 和 D2 存在单相同步。延时后,内置于接触器 L1 和 L2 中的摆动继电器交替打开 L2、L1 和 LZ。变频电机变阻器的启动是按时间原理进行的(时间继电器RU1、RU2、RUZ)。
在图。图 2 显示了地铁自动扶梯的电力驱动图,它允许您在乘客的上升和下降上工作。驱动电机使用功率高达 200 kW 的带相位转子的异步电机。在一天中的某些时段,由于客流量不大,自动扶梯可以长时间几乎处于闲置状态。
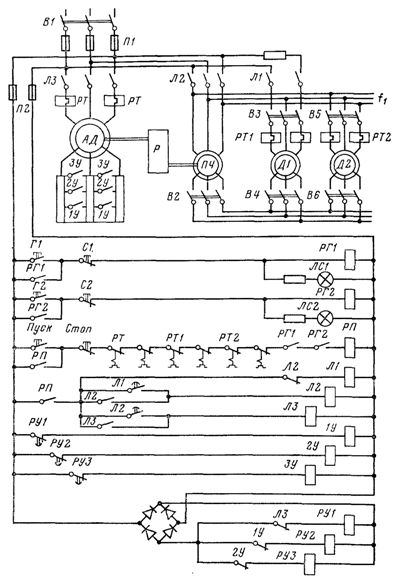
米。 1. 协调运动输送线电驱动方案。
为了提高电机的功率因数和效率,当其轴负载降低到额定值的 40% 左右时,定子绕组由三角形切换为星形。随着负载的增加,它又变回三角形。
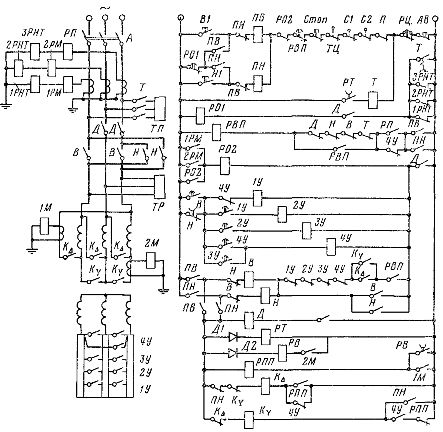
米。 2、地铁自动扶梯电驱动方案。
所述切换由过电流继电器 1M 和 2M 自动完成,它们通过 RPP 和 РВ 继电器控制 kΔ 和 kY 接触器。断开延迟 RV 触点确保 RPP 线圈电路在 2M 断开和 1M 接通期间存在。
在满载的发电机下降模式下,发动机的负载(由于安装的机械损失)明显低于爬升模式下的类似负载。因此,在下垂模式下,电机的定子绕组始终星形连接。使用加速器接触器 1U-4U 上的摆动继电器,电机随时间启动。停止是机械的。在这种情况下,行车制动器 TP 安装在电机轴上,安全 TP 安装在驱动齿轮轴上,以确保在齿轮和电机轴之间的机械连接断开时梯子停止。
该电路实现了上一节中描述的典型安全联锁装置:由于设备的机械部分出现故障——链条和扶手(限位开关 TC、P)的移除,违反步骤结构(限位开关 C1 和 C2) ),轴承温度过高(热继电器 7),来自超速(离心速度继电器 RC)。
此外,还提供电机保护:最大(继电器 1RM、2RM)、过载(继电器 RP)、电机断电(零电流继电器 1RNT、2RNT、3RNT)、电源接触器闭合触点的焊接(打开线圈电路 RVP 中的触点 D、Y、B、T 和线圈电路 B 中的 1U-4U)。
针对断电、轴承过热和电机过载的保护以时间继电器 PO1 和 RVP 确定的时间延迟运行。除远程控制速度继电器外,所有保护都通过将电机与电源断开并应用 TP 行车制动器来停止电机。只有在制动过程结束时,在 PT 继电器的延迟结束后,安全制动器 TP 才会额外启动。当启动 RC 速度继电器或按下紧急停止按钮时,两个制动器同时应用。