地面操作的桥式起重机电力驱动电路
水龙头图和保护功能
 在工业中,在低强度的运输和存储作业期间,在机房和实验室中,使用大量的桥式起重机,或者零星地运行,或者以每小时 6-10 次的起重循环次数运行。为这种起重机使用全职操作员在经济上是不切实际的。这就是为什么越来越多的桥式起重机在地面上操作的原因。
在工业中,在低强度的运输和存储作业期间,在机房和实验室中,使用大量的桥式起重机,或者零星地运行,或者以每小时 6-10 次的起重循环次数运行。为这种起重机使用全职操作员在经济上是不切实际的。这就是为什么越来越多的桥式起重机在地面上操作的原因。
从地面控制的桥式起重机的一个特点是只有在专门指定的地方才能接近起重机进行维修和控制,这些地方配备了适合检查机械和电气设备的区域。因此,起重机的整个电气设备保护系统的构造必须能够在紧急情况下将起重机带到维修区,在地面的控制下,并且在电路中没有起重机的情况下 短路和接地故障.
在这方面,在落地式起重机上, 断路器 没有安装。主电路由自动电源开关保护 基本手推车和控制电路的保护—— 保险丝 适用于 15 A、380 V 的电流,控制电路的导线横截面为 2.5 mm2。对机构电驱动进行过载保护 热继电器 在发动机的主电路中。
为了使水龙头在触发热保护后移动,继电器触点连接到控制面板上的按钮。该阀配备了输入电压信号灯、线路保护接触器后电压信号灯和热保护操作信号灯。
桥式起重机运动机构的电气图
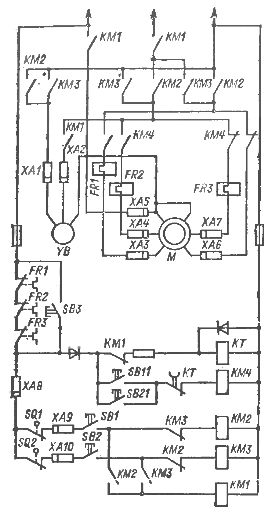
在图。图 1 为单速电机短路控制下的电驱动运行示意图。
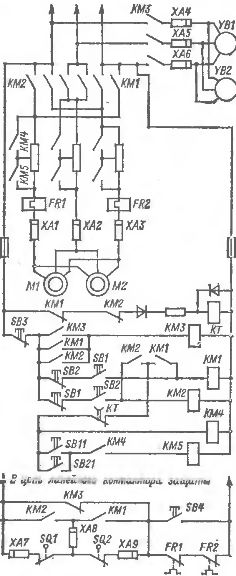
米。 1、起重机行走机构电驱动(单速鼠笼式电动机)地面作业方案: M1、M2——电动机,YB1、YB2——制动电磁铁或电液推杆,KM1、KM2——方向接触器,KM4、KM5——电路定子中的电阻接触器,KMZ——制动接触器,KT——启动时间继电器,FR1、FR2——热继电器,SQ1、SQ2——限位开关,SB1、SB2——运动方向按钮(两个- 方式), SB11, SB21 — 启动按钮, SB3 — 自由移动停止按钮, SB4 — 热保护旁路按钮, XA1 — XA9 — 电流传输小车触点
该电路设计用于驱动负载能力为 3-20 吨的转向架起重机和负载能力为 2-5 吨的起重机的起重机驱动器。鼠笼式电机的定子绕组通过两级从电源供电电阻器。驱动器的机械特性如图 1 所示。 2、一个。
电力驱动的控制——通过悬浮按钮。该控件包括两个主要的双向按钮 SB1 和 SB2,它们发出向两个方向移动的命令。当使用按钮 SB11、SB21 发出命令时,无需调整电阻器即可转换到位置。
当发动机启动时,通过接触器KM1、KM2的触点通过KMZ的触点向YB制动驱动器供电。电机关闭后,制动驱动继续通电,机构自由运转,松开制动器,使用转向架和车桥机构通用的SB3按钮。触发时 限位开关 SQ1和SQ2,保护线路接触器跳闸叠加 机械刹车.
提供电力 反向制动 使用免费启动后 时间继电器 CT 具有 2-3 秒的时间延迟,可将驱动器减速至具有最小启动(制动)扭矩的位置。
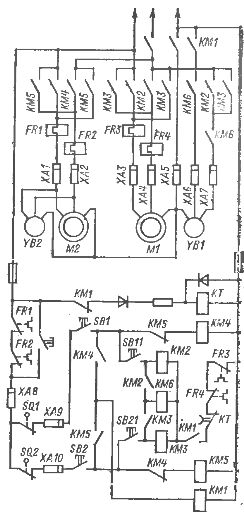
在图。图 3 显示了用于桥式起重机(小车)移动的电力驱动示意图 两速鼠笼式电机… 电机有两个独立的绕组,极比为



SB1或SB2按钮包括方向接触器KM1、KM2和低速接触器KM4。通过接触器KMZ向电机低速绕组供电后,制动执行器YB1、YB2得电。要切换到高速,双向按钮 SB 闭合触点 SB11、SB21(第二个位置)并打开接触器 KM6。
高速线圈与低速线圈同时通过电阻接入电网。然后关闭低速线圈。在 KT 继电器延时(2-5 秒)后,接触器 KM5 接通,电机达到其高速模式的自然特性(图 2,b)。
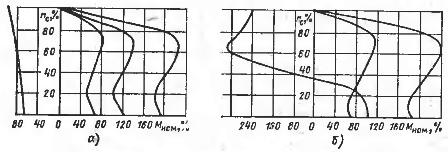
米。 2.机械特性图13
当电机与电源断开时,制动执行器继续通电并发生惯性滑行。由高速变低速时可采用电制动。要释放制动器,只需按下 SB3 按钮。
当最后一道防御被开场触发时 保护面板上的线路接触器 电动机关闭,机械制动器接合。该机制受到最大强度的抑制。
由于高速绕组在电路中使用了电阻,在时间继电器KT的控制下进行了比较软的启动,但低速绕组的制动力矩不受限制,在这种情况下,软启动制动可以通过SB1或SB2按钮的几个脉冲开关来实现。
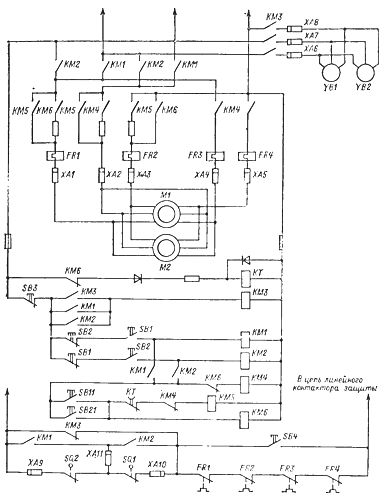
米。 3.地面操作时起重机运行机构的电驱动(带两速鼠笼电机)图:M1。M2 - 电动机,YB1,YB2 - 制动驱动器,KM1,KM 12 - 行进方向接触器,KMZ - 制动接触器,KM4 - 低速接触器,KM5 - 高速接触器,KM6 - 定子电路中的电阻接触器, FRI、FR2、FR3——热继电器,KT——运行控制时间继电器,SQ1、SQ2——限位开关,SB1、SB2——行驶方向按钮(双向):SB11、SB21——高速按钮(第二按钮位置SB1、SB2), СВЗ — 释放自由停止按钮,SB4 — 热保护旁路按钮,ХА1- ~ ХЛ11 — 电流传输小车的触点。
在图。图 4 为采用双速电机的桥式起重机行走机构示意图,无自由排水。该电路不同于低速绕组和高速绕组依次包含以及绕组串联时制动力矩有一定限制所考虑的电路。该方案推荐用于室外作业的桥式起重机。
起重机起升机构连接图
在图。图 5 为电动葫芦驱动控制电路,采用两速鼠笼式电动机,具有两个独立绕组,极数比为 4/24 和 6/16。该电路基于电动机绕组主电路和制动驱动电路两个独立装置的双重分断原理构建,提供了提升驱动所需的可靠性。
按下相应按钮SB1、SB2(第一位置)后,电动机低速绕组通过线路接触器KM1的触点、方向接触器KM2、KMZ的触点和接触器KM4的分断触点供电。
米。 4、起重机运行机构电驱动(采用双速鼠笼电机)方案:M——电动机,YB——制动驱动,KM1、KM2——运动方向接触器,KMZ——低速接触器,KM4——高速接触器,KM5——高速电阻接触器,CT——启动时间控制继电器,FR4——热继电器,SQ1、SQ2——限位开关,SB1、SB2——行程方向按钮,SB11、SB21——高位速度按钮,SB3 — 旁路热继电器按钮,XA1 -XA10 — 电流传输触点
当按下SB11(SB21)按钮时,接触器KM4的线圈得电,从低速切换到高速,断电最小。在这种情况下,高速和低速线圈禁用时不能有位置。从低速绕组到高速绕组的转换是在时间继电器KT的控制下进行的。当限位保护被激活时,电机绕组和制动器被激活两次。
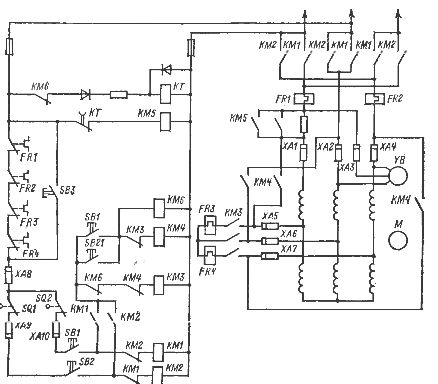
在图。图6显示了升降机构的电驱动图,其中两个短路的电动机相互连接并通过齿轮比为6-8的行星齿轮连接到变速箱。低速电动机M2在机构运行的整个过程中都处于开启状态。高速电机在高速运行期间接合。低速电动机具有内置制动器。
米。 5、起升机构地面操作时电驱动(采用二速鼠笼式电动机)方案:M——电动机,YB——制动线圈,KM1——百合接触器,KM2——KMZ——方向接触器, KM4——速度切换接触器,FR1——FR3——热继电器,CT——加速控制继电器,SQ1、SQ2——限位开关,SB1、SB2——方向按钮(双向)。 SB3——分流热继电器按钮,SB11、SB21——高速按钮(按钮SB1、SB2的第二个位置),XA1——XA10——电流转换小车触点。
米。 6、起升机构落地运行微电机方案:M1-高速电机,M2-低速电机,YB1-高速制动线圈,YB2-低速电机制动线圈,KM1 - 线性接触器,KM2 - KMZ - 高方向接触器,KM4,KM5 - 低速接触器,KM6 - 高速制动接触器,KT - 启动时间控制继电器,SQ1,SQ2 - 限位开关,FR1 - FR4 - 热继电器, SB1、SB2——双向方向按钮,SB11、SB21——高速按钮(按钮SB1、SB2的第二个位置),XA1——XA10——电流传输小车触点
高速电动机有一个单独的制动器,由 电动液压推进器… 当方向键SB1(SB2)按下时,接触器线圈KM4(KM5)得电,低速电机启动。同时,公共线路接触器 KM1 接通。
当按钮SB1(SB2)完全按下时,触点SB11(SB21)闭合,接触器KM2(KMZ)和KM6的线圈得电,但在继电器KT控制下的低速启动时间已到后,高速电机开启。
关闭高速电机后减速上升或下降时,由YB1制动器进行低速制动。限位开关 SQ1 和 SQ2 启动后,电驱动关闭,电机和制动驱动双开路。
所有描述的方案,根据在地板上工作时激活起重机机构的规定,只需不断按下按钮。当任何类型的保护关闭时,无论按钮控制的状态如何,机构都会停止设备。
图 1 中考虑的方案。 2-5个可以组装起来 标准磁力启动器 类型 PMA、PML 和时间继电器。一个例外是图 1 中的图表。 2 其中接触器用于切换转速 直流接触器 MK1-22, 40 A, 380 V, 线圈220 V。根据所示方案,功率为0.8至2×8.5 kW的电机控制板和功率为10至22 kW的起重电机控制板已发达。