电路元件的连接图
 接通电路元件的方案使您可以直观地跟踪电路中电气设备的接通顺序以及接通后电路在其运行过程中发生的变化,即电路图有助于分析电路随时间的性能。在分析过程中,根据切换方案,看该方案是否保证机器、机构或装置在运行模式下的正常运行,以及在紧急模式下将如何动作。
接通电路元件的方案使您可以直观地跟踪电路中电气设备的接通顺序以及接通后电路在其运行过程中发生的变化,即电路图有助于分析电路随时间的性能。在分析过程中,根据切换方案,看该方案是否保证机器、机构或装置在运行模式下的正常运行,以及在紧急模式下将如何动作。
要构建包含电路元件的图,请绘制水平平行线,其数量必须与电路中电气设备的数量相匹配。每行都标有其电气设备的名称。时间是沿着这些线测量的,并且假定所有设备的时间标度是相同的。
控件(按钮、开关、开关等)的管理,即单位置元素由矩形表示。矩形表示电路中器件闭合和断开的时刻。带线圈的电气设备(电磁启动器、中间继电器、时间继电器等)的动作用梯形表示。所有梯形的高度相同,长度由运行时的延时决定。如果任何设备作用于另一个设备,则此过程由箭头指示。
让我们用元件电路的元件电路图来看一下排水泵的控制电路的工作情况。
排水泵设计用于从地下运输廊道抽取地下水和雨水。为了收集水,画廊被布置成略微倾斜,在其尽头有排水坑。鉴于雨水中的地下水会破坏生产机制,因此为它们使用了两个泵:一个工作泵和一个备用泵。带自动开关的排水泵不可逆电驱动控制方案如下所示。
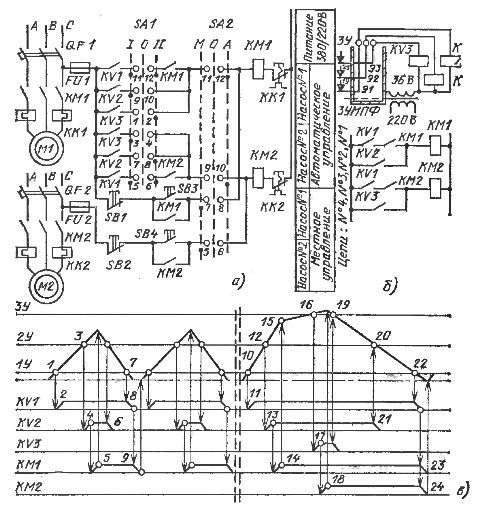
米。 1. 带自动备用输入(a)、辅助电路(b)及其元件运行图(c)的排水泵不可逆电驱动原理图控制图。
作为对自动化方案的初步研究的结果,发现以下内容:
1)泵控制结构提供本地和自动控制,
2)自动控制由:KV1——下级继电器,KV2——上级继电器,KV3——上级报警级继电器。当水池中的水位上升到 KV2 继电器启动的点时,泵将打开。当液位下降到正常值时,KV1继电器释放,水泵停止。如果一台泵无法处理泵送且液位继续上升,则报警继电器 KV3 将被激活并启动第二台泵。当液位下降到正常水平时,两个泵都关闭,
3)为了泵的统一运行,可以在自动控制过程中改变泵的开启顺序。
为了更清楚地了解电路在自动控制下的运行,我们将使用如下的通用技术。
我们创建了一个辅助电路(图 1,b)并在其上描绘了一个带有标记的曲轴箱:1U - 下层,2U - 上层,3U - 紧急上层。我们将电极 E1 — E3 释放到这些标记上,并将它们分别连接到继电器 KV1 — KV3。
我们复制了一份图表(图 1,a),其中仅显示了继电器 KV1 和 KV2 的触点与第一个泵的磁力启动器 KM1 以及继电器 KV3 的触点与磁力启动器的连接第二个泵的 KM2。
接下来,我们构建了一个包含电路元件的图表(图 1,c),并在其中反映填充和泵送轴的过程以及对继电器位置的依赖性。
图中,1U—3U线对应三层,虚线对应排水池。
盖子开始充满,其中的水达到 1U 水平(图中的点 1)。在这种情况下,继电器电路 KV1 闭合,继电器被激活(点 2)并闭合电路 1 中的触点(见图 1.6),但是磁力启动器 KM1 没有打开,因为闭合触点 KM1 是与继电器触点KV1串联。
当达到 2U 液位(第 3 点)时,继电器 KV3(第 4 点)打开,2 号电路打开磁力启动器 KM1(第 5 点)并开始泵送。很快 KV2 继电器被释放(点 6),但是泵没有关闭,因为 KV1 线圈继续通过电路 #1 通过触点 KV1 和 KM1 接收电力。最后,液位下降到正常值(第 7 点),KV1 继电器释放(第 8 点)并关闭磁力启动器(第 9 点)。一段时间后,当水在竖井中积聚时,一切都以相同的顺序重复进行。
如果将雨水添加到地下水中,则竖井的填充会更加密集地进行(10-12 线比 1-3 线更陡)。在点 10,继电器 KV1(点 11)打开并准备电路 #1 和 3。当达到级别 2U(点 12)时,继电器 KV2(点 13)被激活并通过电路 1 接通 KM1。 2(第 14 点)。从这一刻起(从点 15 开始)液位增加的强度减弱(第 15-16 行位于第 10-12 行下方),因为一个泵已经在工作。
在3U层(16点),继电器KV3(17点)动作,KM2(18点)导通,第二台泵开始工作。液位下降,在点 19 它释放 KV3,但第二个泵继续工作,因为 KM2 从电路 3 接收电源。在点 20,KV2 继电器关闭(点 21),但第一个泵不转动关闭,因为 KM1 通过电路 1 接收电源。最后,在点 22,它释放 KV1 并关闭两个磁力启动器(点 23 和 24),泵停止......