绘制时序图和机制操作框图的示例
在工艺线的控制方案中,输出元件的状态,即执行器(电磁继电器、磁启动器、固态继电器等),不仅取决于输入或接收元件(按钮、传感器等)的组合,还取决于它们随时间变化的顺序。
对设计的工艺过程的口头描述可以用输入输出信号变化的时间表的形式来表示,称为工艺过程的时间图。

将根据谷物预清理线图制作时序图的示例。
电路工作说明
使用 SA1 开关选择操作模式:自动 — 主要操作模式,手动 — 调试模式。
调试模式包括通过锁定按钮 SB4-SB6 向线性机构的磁启动器线圈供电,绕过所有控制逻辑。在这种模式下,操作员自己决定生产线的长度或一些单独的机制,料斗的填充控制仅在视觉上进行。
通常,这种操作模式用于紧急操作模式,当控制逻辑被破坏并且需要在不丢失产品的情况下完成工艺流程时,或者在调试期间,当某些机制修复后就行了,有必要只启动它,而不是所有的线性机制。
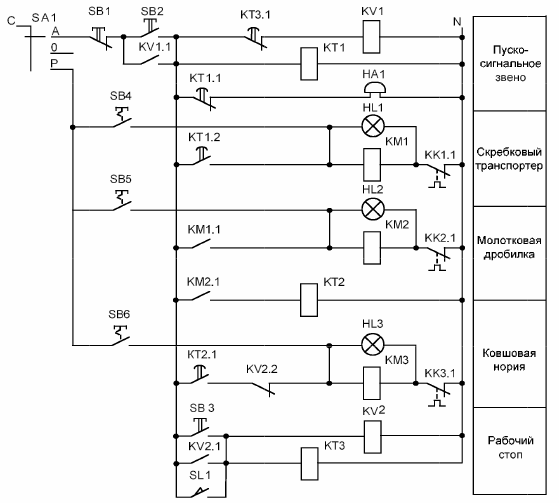
米。 1.粮食预清线继电接点控制电路
在操作模式切换之后,控制电路中包含一个启动信号块,它允许在延时的情况下同时关闭钟罩和打开刮板输送机。在组成继电器触点电路时,通过磁力启动器的闭合触点来执行打开或关闭机构的顺序。
因此,在我们的例子中,如果磁力启动器 KM1(刮板输送机)的线圈上有能量,分别通过触点 KM1.1,磁力启动器 KM2(锤子)的线圈上也会有能量。
同时,启动生产线的所有机构是不切实际的,因为在操作过程中,当生产线的两个机构的电驱动器尚未达到其标称操作模式时,可能会出现这种操作模式,并且产品是通过头部机制传递给他们,导致生产线紧急停止。因此,在控制电路中,通过时间继电器KT2实现的时间延迟向磁头机构的磁启动器KM3的线圈供电。
线性机构已接合,工作正在进行中。有时在操作过程中,有时料斗还没有装满,必须关闭生产线。在这种情况下,控制方案中使用了“工作停止”块,这使得以正确的顺序(在产品沿线移动的方向)关闭生产线的所有机制成为可能。
所以,当按下SB3按钮时,中间继电器KV2导通,其断开触点KV2.2与线圈KM3断开,行头机构关闭。同时,时间继电器 KT3 准备一份关于清洗产品机械装置的生产线运行时间的报告。
一定时间后,时间继电器 KT3.1 的触点断开与中间继电器 KV1 的电路,中间继电器 KV1 的触点绕过启动按钮。这导致整个控制电路停止,结果是线性机构停止。触发 SL1 料斗中的液位传感器时控制电路运行的类似算法。
在所提出的控制方案中,线性电动机的过载保护是通过热继电器 KK1.1 ... KK3.1 的中断触点实现的,它们分别与磁力启动器 KM1 .. 的线圈串联安装在电路中。 .KM3。
为了视觉控制控制电路中线性机构的操作,有指示灯 HL1 ... HL3。直线机构正常运行时,指示灯会亮起。紧急停机时,磁力启动器电路中的电源消失,指示灯随之熄灭。
根据电气主要自动操作模式的方案,谷物预清洁线需要 3 个按钮:SB1 «停止»、SB2 «开始» 和 SB3 «工作停止»,以及一个液位传感器 SL1。因此我们有 4 个输入元素。此外,按钮接受自返回,即无需固定开机状态。
构建时间表的示例
输出项目4:转鼓HA1、刮板输送机KM1、锤式破碎机KM2和斗式提升机KM3。
当按下 SB2 «Start» 按钮时,第一个触发链接(铃 HA1)应激活 10 秒,以警告人员生产线即将启动。
在 HA1 的铃声响起后,即。按下“启动”按钮 SB2 86 10 秒后,刮板输送机 KM1 和冲击式破碎机 KM2 启动(见图 2)。
机构的工作时间根据其生产率和产量确定,刮板输送机、锤式破碎机和斗式提升机的生产率分别为5t/h、3t/h和2t/h。谷物体积确定基于料斗的体积和每 1 立方米的一公斤谷物。
不同农作物的粮食形状、密度和重量都不同,因此每种粮食一立方米的重量不可能相同。
让我们假设沙坑的体积为 5 m。加载的谷物是荞麦,重量为 560 - 660 kg。回收站的初始状态是空的。那么满容器的粮食量:N=580×5=2900kg。
斗式提升机的生产率是所有机制中最低的;他还为这条线供应粮食。其工作时间为:Tm3 = 2000/2900 = 0.689 h = 41 min。
其余机制的工作时间将超过 41 分钟,并根据电路逻辑确定。
开启刮板输送机 KM1 和反击式破碎机 KM2 后,必须给它们加速的时间。所有机制的加速时间都是 10 秒。斗式提升机 KM3 最后启动(启动 KM1 和 KM2 后 10 秒),以免在锤式破碎机 KM2 和刮板输送机 KM1 上造成产品堵塞。 41 分钟后,所有需要填充料斗的产品将通过 KM3 斗式提升机。
SL 液位传感器的安装方式使得在产品残渣通过锤式破碎机 KM2 和刮板输送机 KM1 之前就可以接收到料斗填充信号。
当 SL1 水平传感器启动时,KM3 头部机构关闭(在按下 SB2 «开始» 按钮后 41 分 20 秒后)。通过延时,KM1 和 KM2 同时关闭。这个时间延迟可以假设为 20 秒。
正常操作的时序图如图 2 所示。
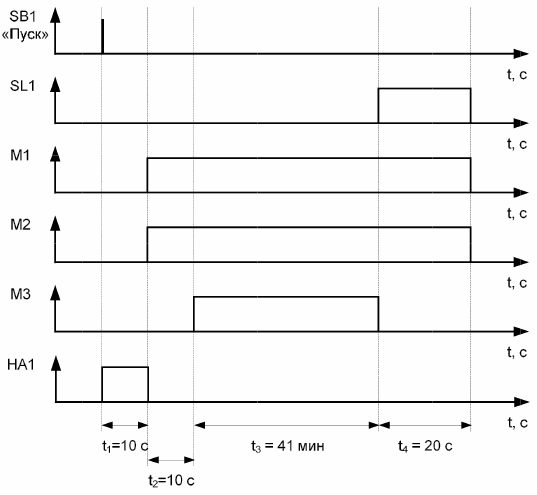
米。 2.正常运行时序图
在《操作停止》模式下,操作员可以在触发液位传感器 SL1 之前停止过程,因此在这种情况下无法确定机构的操作时间。在 «General stop» 模式下,所有机制都会立即停用。
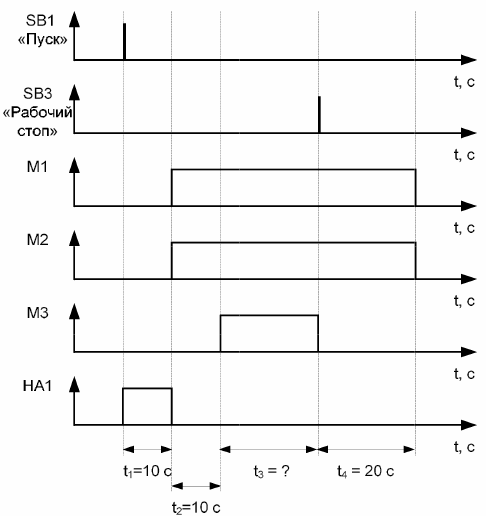
米。 3. «Operation stop» 运行模式的时序图
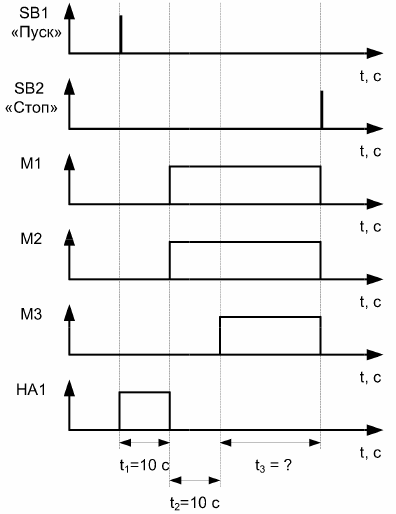
米。 4. «Total stop» 模式的时序图
构建机制运行框图的示例
工艺流程框图必须清楚地显示其工作算法。为此,使用了某些动作的特殊名称。
图 5 显示了谷物预清洗线的示例框图。所提供的方框图显示了技术过程功能的所有可能选项。在按下“开始”按钮SB2后谷物预清线运行期间,“事故”情况随时可能发生。
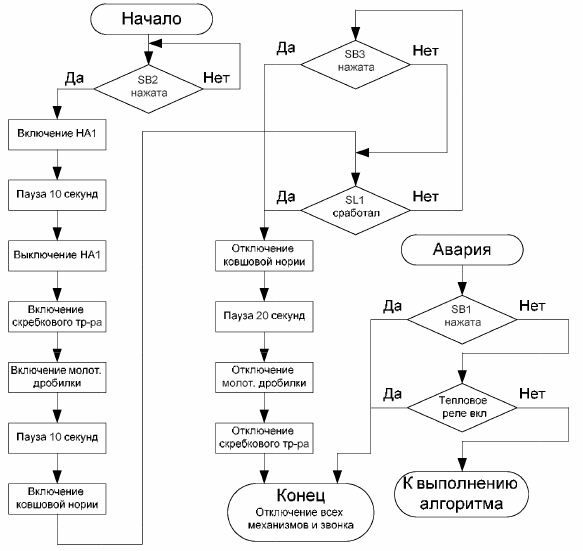
米。 5.粮食预清线方框图