机构运动的活塞控制
继电器电路
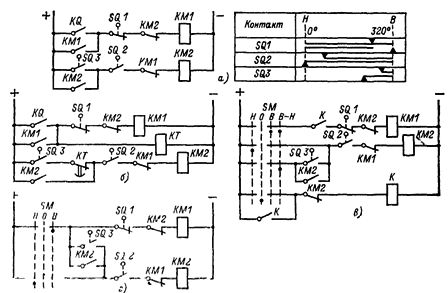
 在图。图 1 显示了由 SQ 控制器固定的恒定冲程活塞运动控制方案的各种变体。
在图。图 1 显示了由 SQ 控制器固定的恒定冲程活塞运动控制方案的各种变体。
图中的图表。在图 1 中,当循环由一个“向前”运动 B 和一个“向后”运动 H 组成到起始位置时,使用 a-c。方案一、a、b与KQ继电器给定的自动命令一起使用。 KT 继电器在开始反向之前提供暂停。在图的图表中。 1、循环启动命令由控制器或万能开关SM给定。
实现无限往复运动,如图1、d.如果冲程数必须受给定值n的限制,则计数继电器的一个断开触点或多个继电器的一个单元,其对“后”接触器KM2的闭合触点提供的脉冲进行计数,是包含在接触器电路 « 正向 » KM1 中。
图 10 显示了在四个位置实现可变行程长度的往复运动的示例。 2.命令装置SQ的触点SQ.1-SQ.4-用于在“前进”行程的1—4位置交替关闭机构,在初始位置触点SQ.5-。该电路使用由自动继电器 KQ1 和 KQ2 发出的脉冲命令,例如,当进给工件时,它是闭合的,它在每个行程结束时固定中间操作的结束。
SQ控制器的顺序操纵SQ.1—SQ.3是通过继电器的触点进行的,用于计算“后退”机构KS1、KSZ和KS5的移动次数。继电器 KS7 固定第四个移动“后退”,关闭继电器 KS1-KC6 并禁止下一次“前进”切换,直到蓝色到达这组空白(继电器 KR)的技术操作结束。 KC7线圈电路中KR继电器的断开触点使电路恢复原状。
米。 1、往复运动继电器控制电路
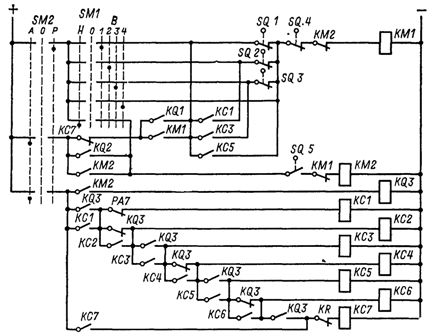
图 2. 可变行程长度往复式继电器的控制方案
逻辑电路
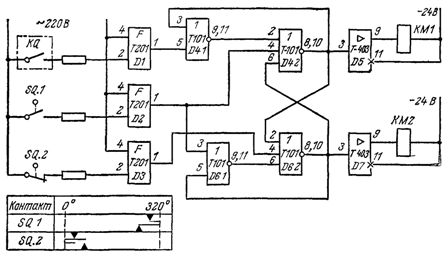
在 «Logic T» 系列元件上制作的活塞运动控制电路如图 1 所示。 3. T-201型元件D1-D3用于协调输入继电器信号与逻辑元件。
当继电器 KQ 以脉冲方式接通时,元件 D4.1、D4.2 的存储器修复了“向前”移动命令的存在。通过放大器D5,前置接触器KM1导通。在“前进”机构运动结束时,当控制器SQ1的触点闭合时,相应元件D2的输出端出现信号1,使存储器D4和接触器KM1断开并导通元件 D6 上的存储器。在这种情况下,给出并记住移动“后退”的命令。当控制器 SQ 2 的触点在初始位置闭合,当信号 1 出现在相应元件 D3 的输出端,禁用存储器 D6 时,该命令被移除并且向后运动停止。
米。 3. 控制 «Logic T» 系列元素往复运动的方案
内存D4和D6被屏蔽,所以只能打开其中一个。当存储器 D4 打开时,来自元件 D4.2 输出的信号 1 被馈送到元件 D6.2 的输入 2,禁用存储器 D6,反之亦然。当存储器 D6 开启时,来自元件 D6 2 输出的信号 1 被馈送到元件 D4.2 的输入 6,从而禁用存储器 D4。