晶闸管稳压器
 晶闸管电压调节器是设计用于控制电动机速度和扭矩的装置。速度和扭矩的调节是通过改变提供给电机定子的电压来实现的,并且是通过改变晶闸管的打开角度来实现的。这种电机控制方法称为相位控制。这种方法是一种参数(振幅)控制。
晶闸管电压调节器是设计用于控制电动机速度和扭矩的装置。速度和扭矩的调节是通过改变提供给电机定子的电压来实现的,并且是通过改变晶闸管的打开角度来实现的。这种电机控制方法称为相位控制。这种方法是一种参数(振幅)控制。
晶闸管电压调节器可以用封闭式和开放式控制系统来实现。开环调节器不能提供令人满意的速度控制性能。它们的主要目的是调整扭矩以获得动态过程中驱动器所需的操作模式。
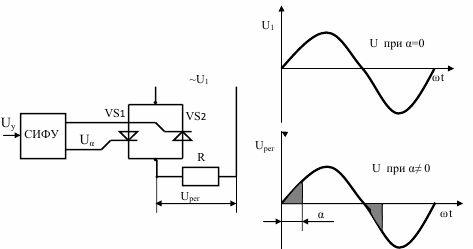
晶闸管稳压器的简化方案
单相晶闸管稳压器的功率部分包括两个受控晶闸管,可确保电流在正弦输入电压下沿两个方向在负载上流动。
闭环晶闸管控制器通常使用负速度反馈,这使得在低转速区域具有足够刚性的驱动器机械特性成为可能。
最有效地使用晶闸管调节器进行速度和扭矩控制 异步转子电机.
晶闸管稳压器的供电电路
在图。图 1 的 a-e 显示了在一相中包含调节器的整流器元件的可能方案。其中最常见的是图 1 中的图表。 1,一个。它可用于定子绕组的任何连接方案。在连续电流模式下,该电路中允许通过负载的电流(均方根值)为:

其中 Azt 是通过晶闸管的电流的允许平均值。
最大正向和反向晶闸管电压

kzap——考虑到电路中可能的操作过电压而选择的安全系数; ——网络线电压的有效值。
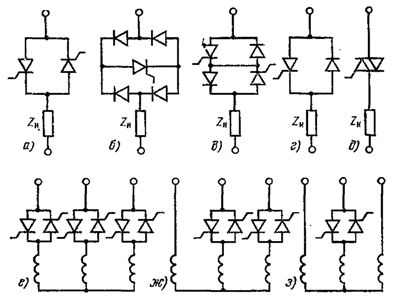
米。 1、晶闸管稳压器电源电路方案。
在图的图表中。在图1b中,非受控二极管桥的对角线上只有一个晶闸管。该电路的负载电流与晶闸管电流之比为:

选择不受控二极管的电流是晶闸管的一半。晶闸管的最大正向电压
晶闸管的反向电压接近于零。
图中的示意图。图 1b 与图 1b 的方案有一些不同。 1、但是对于管理体系的建设。在图的图表中。 1,每个晶闸管的控制脉冲必须遵循电源的频率。在图的图表中。在图 1b 中,控制脉冲的频率是原来的两倍。
图中的示意图。 1、c,由两个晶闸管和两个二极管组成,如果可能,晶闸管的控制、负载、电流和最大正向电压类似于图1中的示意图。 1,一个。
由于二极管的分流作用,该电路中的反向电压接近于零。
图中的示意图。 1d 的晶闸管电流和最大正向和反向电压与图 1d 的电路相似。 1,一个。图中的示意图。 1、d不同于控制系统所考虑的要求,提供必要的晶闸管控制角变化范围,如果角度从零相电压开始算起,则对于图1中的电路。 1、a-c的关系
其中φ-负载的相位角。
对于图一的电路1,d,类似的比率采用以下形式:
增加角度变化范围的需要复杂化 晶闸管控制系统……如图所示。如图 1 所示,当定子绕组在没有中性导体的情况下以星形连接,以及在整流器包含在线路导体中的三角形连接时,可以应用 d。该方案的范围仅限于具有反向接触的不可逆和可逆电驱动。
图中的示意图。 4-1,e在其性质上与图4中的方案类似。 1,一个。这里的三端双向可控硅电流等于负载电流,控制脉冲的频率等于电源电压频率的两倍。三端双向可控硅电路的缺点比传统晶闸管小得多,允许值 du / dt 和 di / dt。
对于晶闸管稳压器,最合理的方案如图。 1、但用两个反并联的晶闸管。
调节器的电源电路在所有三相(对称三相电路)中,在电机的两相和一相中均采用反并联晶闸管实现,如图3所示。 1, f, g 和 h 分别。
在起重机电气驱动器中使用的稳压器中,应用最广泛的是图 1 所示的对称开关电路。 1, e,其特点是高次谐波电流的损耗最低。具有四个和两个晶闸管的电路中较大的损耗是由电机相位中的电压不平衡决定的。
PCT系列晶闸管稳压器基本技术数据
PCT 系列晶闸管调节器是用于改变(根据给定法则)提供给带绕线转子的感应电动机定子的电压的装置。 PCT 系列晶闸管控制器是根据对称三相开关电路制造的(图 1,e)。在起重机电驱动中使用指定系列的调节器可以在 10:1 范围内调节旋转频率,并在启动和停止期间以动态模式调节发动机扭矩。
PCT 系列晶闸管稳压器设计用于 100、160 和 320 A 的连续电流(最大电流分别为 200、320 和 640 A)和 220 和 380 V AC 的电压。该稳压器由组装在一个公共框架上的三个电源单元(根据反并联晶闸管的相数)、一个电流传感器单元和一个自动化单元组成。电源使用带挤压铝型材冷却器的平板晶闸管。风冷——自然。所有版本的调节器的自动化块都是相同的。
晶闸管调节器的制造防护等级为 IP00,旨在安装在标准 TTZ 型磁性控制器框架上,其设计类似于 TA 和 TCA 系列控制器。 PCT系列调压器的外形尺寸和重量如表所示。 1.
表1 PCT系列稳压器外形尺寸及重量

TTZ 磁力控制器配备了用于使电机反转的方向接触器、转子电路的接触器和电力驱动器的其他继电器接触元件,它们将控制器与晶闸管调节器进行通信。调节器控制系统的构造结构由图1所示的电驱动功能图可见。 2.
三相对称晶闸管块T由SFU相控系统控制。使用调节器中的控制器KK,改变BZS的速度设置,通过块BZS,在时间的函数中,控制转子电路中的加速器KU2。参考信号与TG测速发电机的差值经放大器U1和UZ放大,在放大器UZ的输出端接一个逻辑继电器器件,有两种稳定状态:一种对应于正向接触器的接通KB,第二个 - 接通正向接触器反向 KN。
在逻辑器件状态发生变化的同时,开关设备的控制电路中的信号发生反转。来自匹配放大器 U2 的信号与来自限流块 TO 的电机定子电流延迟反馈信号相加并馈送到 SFU 的输入端。
逻辑块 BL 还受到来自电流传感器 DT 和电流存在模块 NT 的信号的影响,这会在通电时禁止方向接触器的切换。 BL单元还对稳速系统进行非线性校正,以保证驱动的稳定性。调节器可用于起重和行走机构的电力驱动。
PCT 系列稳压器带有限流系统。用于保护晶闸管免受过载和限制动态模式下电机扭矩的电流限制水平从稳压器额定电流的 0.65 到 1.5 平稳变化,用于防止过电流的电流限制水平从 0 ,9 到。 2.0 调节器的额定电流。广泛的保护设置允许相同标准尺寸的调节器与功率相差约 2 倍的电机一起运行。
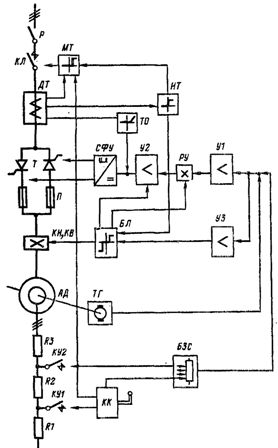
米。 2. 带 PCT 型晶闸管调节器的电驱动功能图: KK — 命令控制器; TG——测速发电机; KN、KB——方向接触器; BZS——速度设定块; BL——逻辑块; U1,U2。 US——放大器; SFU——相位控制系统; DT——电流传感器; IT——当前存在单位; TO——限流单元; MT——保护单元; KU1、KU2——加速接触器; KL——线性接触器:R——断路器。
米。 3.晶闸管稳压器PCT
电流存在系统的灵敏度为相位中的 5-10 A rms 电流。稳压器还提供保护:零、开关过电压、至少一个相位(阻止 IT 和 MT)中的电流损失、无线电接收干扰。PNB 5M 型高速熔断器提供短路电流保护。