晶闸管电驱动
 在工业中,带有受控半导体阀的执行器——晶闸管——被广泛使用。晶闸管的制造电流高达数百安培,电压高达 1000 伏或更高。它们的特点是效率高、尺寸相对较小、速度快,并且能够在很宽的环境温度范围内(从 -60 到 +60°C)工作。
在工业中,带有受控半导体阀的执行器——晶闸管——被广泛使用。晶闸管的制造电流高达数百安培,电压高达 1000 伏或更高。它们的特点是效率高、尺寸相对较小、速度快,并且能够在很宽的环境温度范围内(从 -60 到 +60°C)工作。
晶闸管不是一个完全可控的装置,它是通过在控制电极上施加相应的电位来开启的,只有由于中断电压,它的自然过渡通过零或阻尼的供应而强制中断电流电路才能关闭相反符号的电压。通过改变控制电压的供给时间(其延迟),您可以调整整流电压的平均值,从而调整电机的速度。
无稳压时整流电压的平均值主要由晶闸管变流器的开关电路决定。传感器电路分为两类:零拉和桥接。
在中大功率装置中,主要使用桥式变换器电路,主要有两个原因:
-
每个晶闸管上的电压较低,
-
没有恒流分量流过变压器绕组。
转换器电路的相数也可能不同:从低功率装置中的相数到大功率转换器中的 12 - 24 相。
晶闸管转换器的所有变体都具有积极的特性,例如低惯性、缺少旋转元件、尺寸更小(与机电转换器相比),但有许多缺点:
1. 硬连接网络:网络中的所有电压波动都直接传输到驱动系统并且负载增加,电机轴立即转移到网络并引起电流冲击。
2、调低电压时功率因数低。
3、产生高次谐波,对电网造成负荷。
晶闸管变流器驱动的电动机的机械特性由施加在电枢上的电压及其随负载变化的性质决定,即变流器的外特性以及变流器和电动机的参数。
晶闸管的装置和工作原理
晶闸管(图 1,a)是一种四层硅半导体,具有两个 pn 结和一个 n-p 结。阳极电压Ua作用下流过晶闸管的电流Az的大小取决于控制电压Uy作用下流过控制极的电流Az。
如果没有控制电流(Azy = 0),那么随着电压 U 的增加,用户 P 电路中的电流 A 将增加,但仍保持一个非常小的值(图 1,b)。

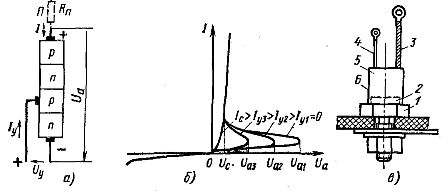
米。 1.晶闸管的方框图(a)、电流-电压特性(b)和结构(c)
此时在非导通方向导通的n-p结具有高阻值。在阳极电压的某个值 Ua1(称为打开电压、点火电压或开关电压)下,阻挡层发生雪崩击穿。其电阻变小,电流强度增加到根据欧姆定律由电阻 Rp 确定的值用户P。
随着电流 Iу 的增加,电压 Ua 降低。电压Ua达到最低值时的电流Iu称为修正电流I。
当电压 Ua 移除或符号改变时,晶闸管闭合。晶闸管的额定电流I是在不引起不可接受的过热的情况下正向流动的电流的最大平均值。
标称电压 Un 称为确保设备给定可靠性的最高允许振幅电压。
由标称电流产生的电压降ΔUncreated称为标称电压降(通常ΔUn = 1 — 2 V)。
校正电流强度 Ic 的值在 0.1 — 0.4 A 的范围内波动,电压 Uc 6 — 8 V。
晶闸管可靠打开,脉冲持续时间为 20 — 30 μs。脉冲之间的间隔不应小于 100 μs。当电压Ua降为零时,晶闸管关断。
晶闸管的外部设计如图 1 所示。1、v… 铜基 1十六硅四层结构 2 带螺纹尾部,带负电源 3 控制4路输出。硅结构由圆柱形金属外壳5保护。绝缘体固定在外壳6中。底座1中的螺纹用于安装晶闸管并将阳极电压源连接到正极。
随着电压 Ua 的增加,打开晶闸管所需的控制电流减小(见图 1,b)。控制开启电流与控制开启电压uyo成正比。
如果 Uа 按正弦规律变化(图 2),则所需电压和 0 开度可用虚线表示。如果施加的控制电压 Uy1 恒定且其值低于电压 uuo 的最小值,则晶闸管不会打开。
如果控制电压增加到值 Uy2,一旦电压 Uy2 变得大于电压 uyo,晶闸管就会打开。通过改变 uу 值,可以在 0 到 90° 的范围内改变晶闸管的开启角度。
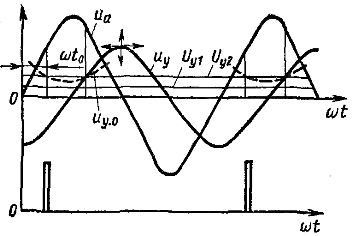
米。 2.晶闸管控制
为了在 90° 以上的角度打开晶闸管,使用可变控制电压 uy,例如,它以正弦曲线变化。在该电压的正弦波与虚线 uuo = f (ωt) 的交点对应的电压处,Tiristor 打开。
通过向右或向左水平移动正弦波 uyo,可以改变晶闸管的开度角 ωt0。这种打开角度控制称为水平。它是使用特殊的相位开关进行的。
通过垂直向上或向下移动相同的正弦波,您还可以改变张角。这种管理称为垂直管理。在这种情况下,用可变电压控制tyy,在代数上加上一个恒定的电压,例如,电压Uy1……通过改变这个电压的大小来调节打开角度。
一旦打开,晶闸管保持打开状态,直到正半周期结束,控制电压不影响其运行。这也使得通过在正确的时间周期性地施加正控制电压脉冲来应用脉冲控制成为可能(图 2 底部)。这增加了控制的清晰度。
通过以这种或那种方式改变晶闸管的开启角度,可以向用户施加不同形状的电压脉冲。这会改变用户终端的平均电压值。
各种设备用于控制晶闸管。在图所示的方案中。 3、交流电源电压加在变压器Tp1的初级绕组上。
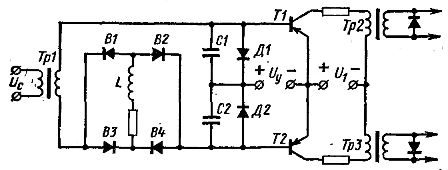
米。 3、晶闸管控制电路
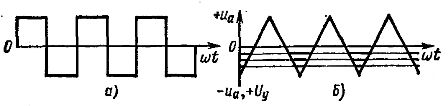
该变压器的次级电路中包含一个全波整流器B。1、B2、B3、B4在直流电路中具有显着的电感L。实际波流实际上被消除了。但这样的直流电只能通过对具有图1所示形式的交流电进行全波整流来获得。 4、一个。
因此,在这种情况下,整流器B1、B2、B3、B4(见图3)是交流电形式的转换器。在该方案中,电容器 C1 和 C2 与矩形电流脉冲交替串联(图 4,a)。在这种情况下,在电容器 C1 和 C2(图 4,b)的极板上,形成横向锯齿波电压,施加到晶体管 T1 和 T2 的基极(见图 3)。
该电压称为参考电压。直流电压Uy也作用于各晶体管的主电路。当锯电压为零时,电压 Uy 在两个晶体管的基极产生正电势。每个晶体管在负基极电位下以基极电流打开。
当锯齿参考电压的负值大于 Uy 时,就会发生这种情况(图 4,b)。这个条件的满足取决于 Uy 在不同相位角值下的值。在这种情况下,晶体管打开不同的时间段,具体取决于电压 Uy 的大小。
米。 4.晶闸管控制电压图
当一个或另一个晶体管打开时,矩形电流脉冲通过变压器 Tr2 或 Tr3 的初级绕组(见图 3)。当这个脉冲的前沿通过时,在次级绕组中产生一个电压脉冲,施加到晶闸管的控制电极上。
当后面的电流脉冲通过次级绕组时,会产生一个极性相反的电压脉冲。该脉冲由绕过次级绕组的半导体二极管关闭,并且不应用于晶闸管。
当用两个变压器控制晶闸管时(见图 3),会产生两个脉冲,相移 180°。
晶闸管电机控制系统
在直流电机的晶闸管控制系统中,电机直流电枢电压的变化用于控制其速度。在这些情况下,通常使用多相整流方案。
在图。 5,这种最简单的图用实线表示。在该电路中,晶闸管T1、T2、T3分别串联在变压器的次级绕组和电机电枢上; NS。 ETC。 c.次级绕组异相。因此,当控制晶闸管的开启角度时,相对于彼此相移的电压脉冲被施加到电机电枢。
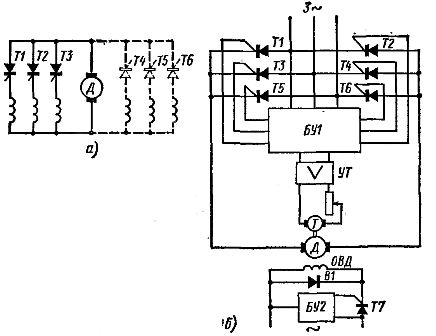
米。 5.晶闸管驱动电路
在多相电路中,间歇和连续电流可以通过电机的电枢,具体取决于所选的晶闸管触发角。一个可逆电驱动器(图5,a,整个电路)使用两组晶闸管:T1、T2、T3和T4、T5、T6。
通过打开特定组的晶闸管,它们可以改变电动机电枢中的电流方向,从而改变其旋转方向。
也可以通过改变电机励磁绕组中电流的方向来实现电机反转。这种反转用于不需要高速的情况,因为与电枢绕组相比,励磁绕组具有非常高的电感。这种反向行程常用于金属切削机床主运动的晶闸管驱动。
第二组晶闸管还可以执行需要改变电动机电枢中电流方向的制动模式。考虑中的驱动电路中的晶闸管用于打开和关闭电机,以及限制启动和制动电流,从而无需使用接触器以及启动和制动变阻器。
在直流晶闸管驱动电路中,电源变压器是不可取的,它们会增加安装的尺寸和成本,因此通常采用图1所示的电路。 5 B。
在该电路中,晶闸管的点火由控制单元BU1控制。它连接到三相电流网络,从而提供功率并将控制脉冲的相位与晶闸管的阳极电压相匹配。
晶闸管驱动器通常使用电机速度反馈。在这种情况下,使用测速发电机 T 和中间晶体管放大器 UT。还使用电子邮件反馈。 ETC。 c.电动机,通过电压负反馈和电枢电流正反馈同时作用实现。
为了调节励磁电流,使用了带有控制单元 BU2 的晶闸管 T7。在阳极电压的负半周,当晶闸管T7不通过电流时,由于e,OVD中的电流继续流动。 ETC。 c.自感应,通过旁通阀B1关闭。
带脉冲宽度控制的晶闸管电驱动器
在所考虑的晶闸管驱动器中,电机由频率为 50 Hz 的电压脉冲供电。要提高响应速度,建议提高脉冲频率。这是在具有脉冲宽度控制的晶闸管驱动器中实现的,其中频率高达 2-5 kHz 的不同持续时间(纬度)的矩形直流脉冲通过电机电枢。除了高速响应外,这种控制还提供了较大的电机速度控制范围和更高的能量性能。
采用脉宽控制,电机由不可控整流器供电,与电枢串联的晶闸管周期性闭合和断开。在这种情况下,直流脉冲通过电机的电枢电路。这些脉冲持续时间(纬度)的变化会导致电动机转速的变化。
由于在这种情况下晶闸管在恒定电压下运行,因此使用特殊电路将其关闭。最简单的脉冲宽度控制方案之一如图 1 所示。 6.
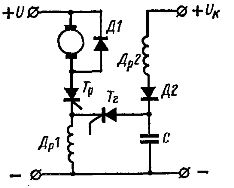
米。 6. 带脉宽控制的晶闸管电驱动
在该电路中,阻尼晶闸管Tr导通时,晶闸管Tr截止。当这个晶闸管打开时,充电的电容器 C 放电到 风门 Dr1,创造了一个重要的e。 ETC。 c. 在这种情况下,扼流圈两端出现电压,该电压大于整流器的电压 U 并指向整流器。
通过整流器和并联二极管 D1,该电压施加到晶闸管 Tr 并使其关断。当晶闸管关断时,电容C再次充电至开关电压Uc>U。
由于电流脉冲频率的增加和电机电枢的惯性,电源的脉冲特性实际上并没有反映在电机旋转的平稳性上。晶闸管 Tr 和 Tr 由允许改变脉冲宽度的特殊相移电路打开。
电气行业对完全调节的晶闸管直流电源驱动器进行了各种修改。其中包括具有 1:20 速度控制范围的驱动器; 1:200; 1: 2000 通过改变电压,不可逆和可逆驱动,带和不带电制动。控制是通过晶体管相脉冲装置进行的。驱动器对电机转速和 e. 计数器等使用负反馈。和
晶闸管驱动器的优点是高能量特性、体积小、重量轻、除电动机外没有任何旋转机械、高速和随时准备工作。晶闸管驱动器的主要缺点是成本仍然很高,大大超过带有电机和磁放大器的驱动器的成本。
目前,用晶闸管直流驱动器广泛替代晶闸管直流驱动器的趋势稳定 变频交流驱动器.