通过改变定子极对数来调节感应电动机的角速度
 随着磁极对数的增加,磁场的角速度减小,因此感应电动机的转子速度也减小。特别版本 双速异步电动机,其定子绕组由独立的部分组成。它们可以以两种不同的方式再次连接:星形和双星形(图 1,a,b)或三角形和双星形(图 1,b,d)。
随着磁极对数的增加,磁场的角速度减小,因此感应电动机的转子速度也减小。特别版本 双速异步电动机,其定子绕组由独立的部分组成。它们可以以两种不同的方式再次连接:星形和双星形(图 1,a,b)或三角形和双星形(图 1,b,d)。
在双星中,场速总是双星或三角形的两倍。但是,这些开关并不相同。事实上,连续运行期间的最大允许转矩取决于绕组加热条件下的最大允许相电流,并取决于与相电压的平方成比例的定子磁通。长期允许功率也取决于相同的值。
如果将电机的绕组从星形切换为双星形,相电压不会发生变化,而从三角形切换为双星形时,相电压会降低√3倍。但是对于双星形,每相的电流可以是星形或三角形的两倍,因为每相由两个并联支路组成。然后我们发现,当从恒星到双星时,速度和功率翻倍,因此临界力矩保持不变(M = P /ω= const)。
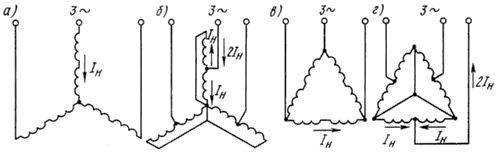
米。 1. 星形 (a) 和双星形 (b)、三角形 (c) 和双星形 (d) 异步电动机定子绕组的连接方案
如果从三角形变为双星形,则相电压降低√3 倍。那么,即使是两相电流,功率也只会增加2 /√3 = l,18倍,可以认为没有变化。在这种情况下,随着角速度增加两倍,功率几乎发生变化,而力矩大约减少两倍。因此,推荐使用星形连接绕组驱动起重设备的电机,以及驱动金属切割机的定子绕组连接三角形的电机。

米。 2.多速电机通行证数据
有两个定子绕组相互隔离的异步电动机,其中一个没有切换,第二个有切换极。之后,获得三速发动机。如果两个绕组都变极,则电机为四级。在某些情况下,使用两个极对数不同的绝缘绕组。 pp 无需切换。例如,在电梯电机中,p1 = 3 和 p2 = 12,对应于 1000 和 250 rpm 的同步旋转速度。
在图。图 3a 显示了双速星型到双星型电机的机械特性, 3、b——由三角变双星时。
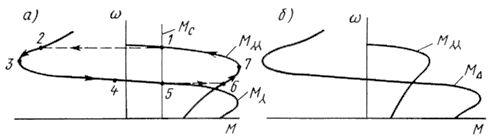
米。 3...从星形切换到双星形(a)和从三角形切换到双星形(b)时异步电动机的机械特性
在从较高速度快速切换到较低速度的情况下,发动机会运行一段时间。 悬浮模式……事实上,如果磁场的速度降低,那么在第一时刻转子继续以相同的速度旋转。
发动机立即从一种特性切换到另一种特性,即从点 1 到点 2(图 3,a)。再生制动紧随其后(第 2、3、4 点),在第 5 点开始以稳定状态运行。如果你从较低的速度切换到较高的速度,电机立即从点 5 移动到点 b,然后加速度跟随(点 6 和 7)并且在点 1 再次出现平衡状态。