接触式和非接触式行程开关的比较
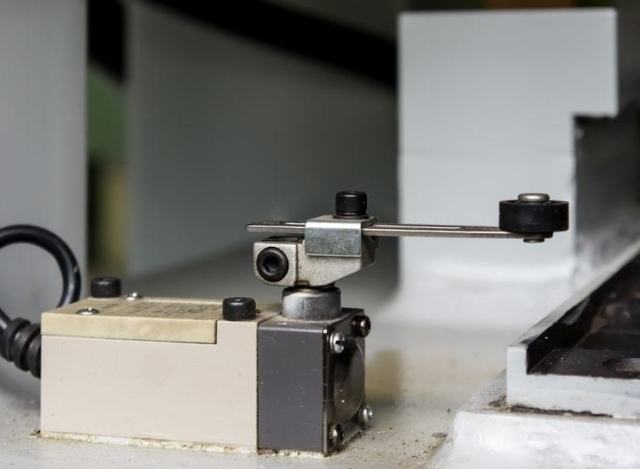
在工业自动化中,电路被广泛使用 行程(位置)开关和开关 多种设计旨在控制各种生产机构的位置,并根据这些机构的运动进行改造 在电信号中.
位置开关还可用于执行生产机构位置控制以外的功能,例如旋转角度、水平、重量压力等的控制。

方向开关是具有离散动作的设备,其工作原理是增加,即它们仅对受控机构的位置变化作出反应。方向开关的输出信号是机构从给定初始位置移动的模糊函数。
道路开关的种类
根据位置切换的原理,切换方式又细分为:
-
由开关触点和接触敏感元件制成的机械触点;
-
静触头(磁力机械式),其敏感元件为非接触式,开关元件为接触式;
-
制成非接触式的静态非接触式、灵敏和开关元件。
在“开关-停止”节点的接触性质中,即在驱动元件(输入控制信号)与敏感元件连接的接触性质中,这种节点称为机械的,在非接触-静态的.
根据设计,开关可以组合或分开。在第一种情况下,敏感元件和开关元件放置在一个外壳中,并在结构上作为一个整体执行。在第二种情况下,敏感元件可以位于距离开关数十米和数百米的位置。
通过改变参数实现路径开关磁场的畸变 磁路 敏感元素。可变参数可以是活性表面积和气隙的大小 磁导率 磁路。
目前,机械接触式位置开关在工业自动化中的应用范围正在缩小,并且出现了这种类型的位置开关对于构建自动控制系统毫无用处的问题。
后者是由以下原因引起的:
-
由于对许多参数的允许波动限制的严格要求,开关止动器组件的设计复杂,这导致其制造和调整非常困难。
-
该设备的精度特性对不稳定因素(接触面磨损、紧固件松动、移动元件未对准等)的影响具有相对较高的关键性。
很多机构的设计方案根本无法基于机械接触开关来实现。这些包括需要高允许水平的速度和运动开关频率的机制。
如果道路开关所需的操作速度可以由于机构的额外运动连接而降低,除其他外,这会降低控制系统的质量特性(特别是精度参数),则允许的操作频率(分辨率)不会因结构并发症而增加。
也可以看看: 限位开关和开关的安装
在这种情况下,位置切换的机械接触原理得到广泛应用的原因是什么?这个问题的答案应该从两个方面去寻找:在现有的自动控制系统的构造原理和触点路径开关电路的优点上。
触点路径开关的优点
通常采用多路输出实现的机械接触开关具有以下优点:
-
高开关比;
-
比控制功率高(内含功率与外形尺寸之比);
-
通用性,即切换直流和交流电路的能力;
-
包含的电压范围大;
-
内部能量消耗可忽略不计(闭合状态下触点的瞬态电阻值很小);
-
操作的准确性和稳定性对受控功率变化的依赖性低。
接触路径开关的缺点
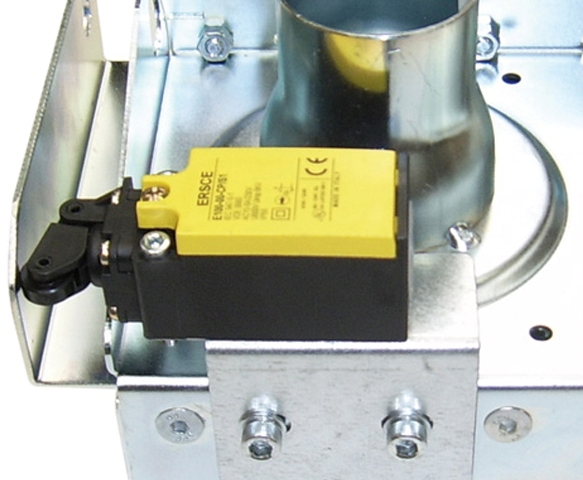
这些设备的机械接触原理通常无法满足自动化系统对可靠性、耐用性和准确性的更高要求。此外,机械接触开关对各种气候因素(尤其是在低温下)的影响非常敏感。
机械接触开关的特点是开关停止的最大和最小移动速度的允许水平有限,在 0.3 — 30 m / min 的范围内,并且将开关停止速度增加到允许水平以上会导致急剧下降在开关的机械耐用性方面。
在此类开关中,开关力作用方向相对于杠杆轴线的允许偏差非常小,超过这些偏差会导致机械损坏,尤其是在带有前拉杆的开关中。
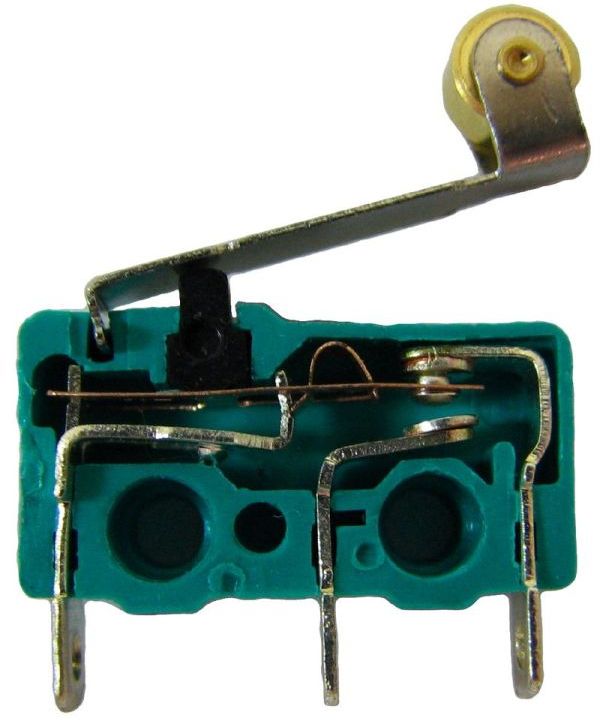
为了获得继电器输出特性(控制特性),在此类开关的设计中提供了触发弹簧装置。所需程度的继电器输出特性是以开关耐久性显着降低为代价的,这是由于在致动时触发器中出现的大动态应力。
在机械瞬时接触开关中,输出特性的滞后环(行程差)的宽度达到了一个显着值,这对于许多工艺过程来说是完全不能接受的,因为加工周期的持续时间会产生非生产性的增加。
减少这些拨链器的行程差异与增加其设计的复杂性或增加其尺寸有关。此外,在某些情况下,需要很大的机械力来致动机械接触开关。
接近开关的优缺点
上面列出的情况导致需要开发没有提到的缺点并且同时能够执行类似功能的设备。这些设备是 接近开关,其好处包括:
-
具有高可靠性和高允许工作频率的显着耐用性;
-
启动时无需机械力,对振动、加速度等的敏感性低;
-
参数对相对广泛的外部条件变化的敏感性微不足道;
-
改善运营服务条件。
由于接近开关的反馈水平较低,因此可以显着简化停止开关的结构,同时保持精度特性随时间的高稳定性。此外,没有电气和机械触点确保了这些设备的防火和防爆安全性,从而显着扩大了它们可能的应用领域。
非接触式限位开关的显着缺点之一是实施许多设计修改的复杂性,而这些设计修改在机械接触式限位开关中很容易实现。
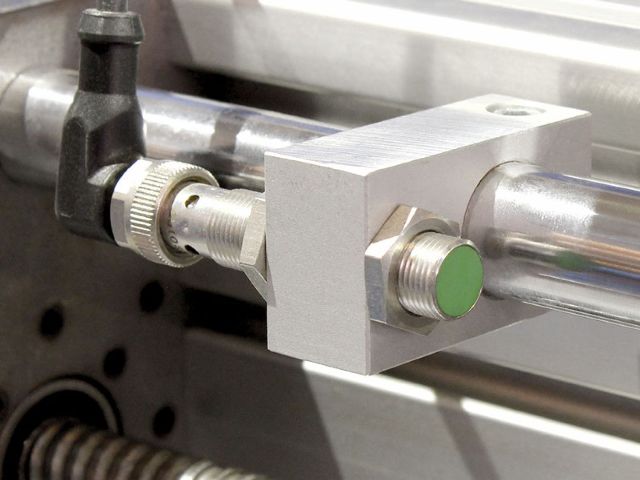
接近开关装置
参数型静态非接触式路径开关的工作原理是基于当驱动元件出现在其区域时敏感元件产生的磁场或电场的失真,结果是不平衡状态发生在开关的电路和输出设备被触发。
静态接近开关通常由单个输出电路制成,在某些开关中,驱动伴随着输出端信号的出现(直接开关效应),在其他情况下 - 消失(反向开关效应),这是等效的分别连接到机械接触路径的闭合和断开触点。
如果继电器式接近开关电路中有放大元件,则传感元件的输出参数可以与受控运动连续函数相关。
目前,使用了多种非接触式行程开关的设计修改,在灵敏度水平(工作间隙的大小)、槽的位置或敏感元件相对于安装平面的平面、方向引线、传感元件的步数(对于带槽的设计)、槽的深度、连接线的长度、电源电压的水平、防止环境影响的性质等。
使用非接触式运动开关的可能性取决于它们的电气和机械特性参数。
电气参数包括:
- 输出信号的性质和输出电路的数量;
- 消耗和输出功率;
- 输出信号的形状;电阻和电压的开关系数(对于变压器型开关);
- 定时特性(触发和释放时间)和触发频率(分辨率);
- 电源电压的电平和形状,以及它们的偏差的允许限度。
机械性能参数包括:
- 灵敏度(工作间隙的大小),
- 尺寸和连接尺寸;
- 精度特性(主要和附加误差)和行程差异;
- 安装特性(开关制动器的类型及其安装方式、反馈水平、开关的安装方式);
- 噪音防护等级。
有关接近开关设备和开关的更多信息,请参见此处: 用于机构位置的非接触式传感器
Ivenski Yu.N.工业自动化中的非接触式行程开关