用彼得罗夫法确定电动机绕组的始末
 有时,在修理后,异步电动机可以在绕组输出端没有标记的情况下出现,然后可以通过顺序执行试点火或彼得罗夫法来确定它们的标记。
有时,在修理后,异步电动机可以在绕组输出端没有标记的情况下出现,然后可以通过顺序执行试点火或彼得罗夫法来确定它们的标记。
Petrov法对异步电动机绕组输出端的标记是将其中一个绕组作为其一相的始端,其末端接另一相的输出端。这两个串联相在降低电压(标称值的 15 — 20%)下接通,以避免绕组过热;对于相转子,其绕组必须开路。第三相连接到电压表。
如果该相的电动势为零,则电动机的前两个绕组通过同名导线连接。然后以这样一种方式重复实验,即其先前连接到电压表的相位被连接到网络的两个相位之一改变。找到的阶段的起点标记为 C1、C2、C3,终点标记为 C4、C5、C6。根据网络的电压,以三角形或星形进一步连接绕组。
桌子。标记鼠笼式感应电动机绕组的输出端。
异步绕组电动机相位标记 起始绕组 终止绕组 L1 C1 C4 L2 C2 C5 L3 C3 C6
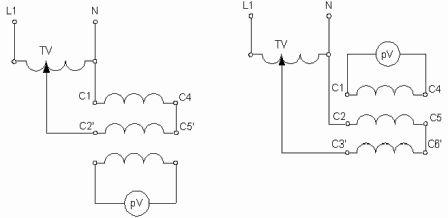
用 Petrov 方法确定线圈的起点和终点