启动绕线转子电机
异步电动机的启动特性取决于其设计特性,尤其是转子装置。
感应电动机的启动伴随着机器的瞬态过程,与转子从静止状态到匀速旋转状态的过渡有关,在该过程中,电动机的扭矩平衡了阻力矩机器的轴。
启动异步电机时,供电网络的电能消耗会增加,这不仅用于克服施加在轴上的制动力矩和弥补异步电机本身的损耗,而且还用于传递一定的动能能源到生产单位的运动环节。因此,在启动时,感应电动机必须产生更大的扭矩。
对于带转子的感应电动机,n = 1 时滑差对应的启动转矩取决于转子电路中引入的可调电阻器的有效电阻。
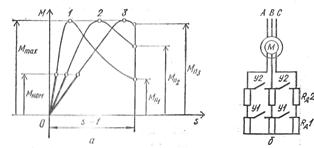
米。 1.启动带有绕线转子的三相异步电动机:a — 带有绕线转子的电动机在转子电路中电阻器的各种有源电阻下打滑的扭矩依赖性图,b — 用于连接电阻器和闭合触点的电路加速到转子电路。
因此,在加速触点 U1、U2 闭合的情况下,即当用滑环短路启动感应电动机时,初始启动转矩 Mn1 = (0.5 -1.0) Mnom 和初始启动电流 Azn = ( 4.5 - 7) Aznom 和其他的。
带有绕线转子的异步电动机的较小启动转矩可能不足以驱动生产单元及其随后的加速,并且较大的启动电流会导致电机绕组发热增加,从而限制其开关频率,并且在网络中低功率会导致暂时的电压下降,这对于其他接收器的操作来说是不希望的。这些情况可能是不能使用大启动电流的绕线式异步电动机来驱动工作机构的原因。

在电机转子电路中引入可调电阻,称为启动电阻,不仅减小了初始启动电流,同时增加了初始启动转矩,可以达到最大转矩Mmax(原图1,a,曲线3),如果相绕转子电机的临界转差
skr = (R2' + Rd') / (X1 + X2') = 1,
式中Rd'——电机转子绕组相中电阻器的有源电阻,降为定子绕组相。进一步增加启动电阻器的有效电阻是不切实际的,因为它会导致初始启动扭矩减弱并退出滑移区域中的最大扭矩点 s > 1,这排除了加速转子的可能性。
相转子电动机启动所需电阻器的有效阻值根据启动要求确定,Mn=(0.1—0.4)Mnom时轻,Mn—(0.5—0.75)Mn时正常,Mn时重。 ≥我。
为了使相绕转子电机在生产装置加速过程中保持足够大的转矩,为了减少瞬态过程的持续时间,减少电机的发热,需要逐渐减小有功电阻的启动电阻。加速过程中扭矩的允许变化 M (t) 由电气和机械条件决定,限制峰值扭矩限制 M> 0.85Mmax,切换力矩 M2 >> Ms(图 2),以及加速度。

米。 2. 绕线转子三相异步电动机的启动特性

通过在时间 t1、t2 分别连续包括加速器 Y1、Y2 来确保包括启动电阻器,从启动发动机的时刻开始计算,此时在加速期间扭矩 M 变得等于切换力矩 M2。因此,在整个启动过程中,所有的峰值力矩都相同,所有的切换力矩都相等。
由于绕线转子异步电动机的转矩和电流相互关联,可以设定转子加速时的峰值电流限制I1 = (1.5 — 2.5) Aznom和开关电流Az2,以保证开关力矩M2 > M.° C.
将带绕线转子的异步电动机从供电网络断开时,始终通过转子电路短路来执行,以避免定子绕组相中出现过电压,该过电压可能超过这些相的额定电压3—4次,如果电机停止时转子电路开路。
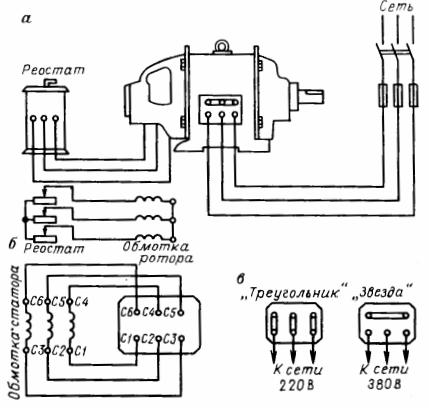
米。 3. 带相转子的电机绕组的连接方案:a——到电网,b——转子,c——在接线板上。
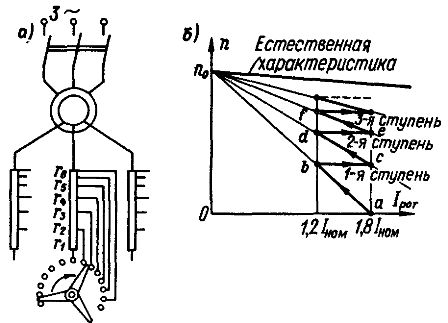
米。 4、用相转子启动电动机:a——开关电路,b——机械特性