无轨电车的工作原理和工作原理
许多城市的居民已经习惯了乘坐无轨电车,以至于他们几乎没有想到此时他们正在使用一种生态且非常经济的交通工具,例如多座电动汽车。同时,无轨电车的装置与电车的装置一样有趣。让我们更深入地探讨这个话题。
现代无轨电车的电气部件相当复杂。其控制系统以半导体为基础,由微处理器控制,与空气悬架、ABS系统协同工作,与复杂的电子信息系统各部分紧密配合。这包括自主运动的可能性、微气候调节系统等。
因此,今天的无轨电车是一种成熟的城市公共交通工具,可以满足安全、舒适和效率的所有要求。

无轨电车的演变是逐渐发展的,几乎与公共汽车的发展方式相同。很容易假设第一辆无轨电车的车身结构及其底盘最初是基于低地板公共汽车,例如 Bogdan-E231、MAZ-203T 等。然而,无轨电车本身出现的时间要晚得多。例如,Electron-T191 和 AKSM-321 等现代城市汽车立即被开发为无轨电车。但是仍然可以追踪到模型之间身体的连续性。
19世纪后期无轨电车的鼻祖:
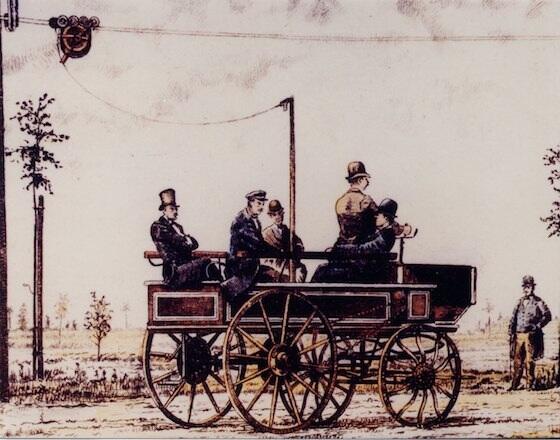
甚至从苏联时代开始,这种从悬链线到手推车的交通工具就成了一种习俗 提供 550 伏的恒定电压……这是标准。在这些条件下,一辆满载的无轨电车在平坦的道路上可以达到大约60公里/小时的速度。
牵引驱动最初是为城市交通设计的,因此将最高速度限制在 65 公里/小时。但即使在这个速度下,车辆也可以在接触线的一侧或另一侧轻松地在 4.5 米范围内机动。现在让我们将注意力转移到这款非凡车辆的电气部件上。
无轨电车的主要部件是 牵引机......在经典版本中它是 直流电机:圆柱形框架、带电刷收集块的电枢、柱、端盖和风扇。
大多数直流小车电动机是串联或复合的。晶体管或晶闸管控制的电机只能与串联励磁系统一起工作。
不管怎样,无轨电车牵引电机是非常令人印象深刻的直流电机,设计功率约为 150 kW,需要额外的直流转换器才能正常稳定运行。电机本身重约一吨,消耗约 300 A 的电流,工作轴扭矩超过 800 N * m(轴速为 1650 rpm)。
现代无轨电车的一些型号携带 由专用交流牵引变流器驱动的交流异步牵引电机... 这种类型的发动机体积更小,而且功能更强大,它们不需要定期维护(与收集器发动机相比)。
但是这样的引擎需要特殊的引擎 半导体转换器…电机本身可能有一对安装在轴上的速度传感器。大多数异步交流牵引电机由 400 V 供电,具有鼠笼式转子和采用经典“星形”连接的三相定子绕组。

发动机通常位于无轨电车车身的后部。在它的驱动轴上有一个法兰,借助于法兰,机械传动通过万向轴通过驱动齿轮到达驱动轴。
电机外壳与身体完全绝缘,因此高压无法到达其导电部件。这是由法兰由绝缘材料制成的事实确保的,并且如果没有绝缘套筒,电机在支架上的安装永远不会完成。
现代无轨电车牵引电机由晶体管脉冲控制系统驱动 IGBT晶体管,这被认为比晶闸管甚至更多的变阻器电路更完美。
该系统包含一个用于连接诊断计算机的开关部分,用于调整和调节发动机控制电路,以及监控整个牵引设备的状况。这种控制系统在能源消耗方面是最经济的,而且它还提供车辆的非接触式启动和加速,没有不必要的能量损失,就像变阻器系统的情况一样。
因此,牵引电机的有效控制提供了无轨电车 启动平稳,无推力调速,制动可靠。 电枢电流约为 50 A 的可调脉冲电压可使无轨电车平稳移动,而不管其机械传动装置中是否存在反冲。
由于当车速达到 25 km / h 时可能会削弱励磁线圈电流,因此也可以无级获得速度控制。制动时,还使用可调电流 - 这称为 动力制动.
后部小车的速度限制不超过 25 公里/小时。由于电子设备,停止优先于启动。如有必要,可以更改受电弓的工作极性。

直接地 晶体管脉冲无轨电车系统 工作方式如下。踩下脚踏板激活 霍尔传感器, 模拟信号电平与当前踏板位置角度直接相关。
该信号被转换为数字信号,并且已经是数字形式,被馈送到牵引装置的微处理器控制器,命令从那里被发送到驾驶员的仪表板 功率晶体管.
功率晶体管的驱动器又根据来自牵引单元的微处理器控制器的命令调节功率晶体管的电流。驱动器的控制电压是低电压(从 4 到 8 伏不等),它的值决定了牵引电机绕组的工作电流。
你猜对了,功率晶体管在这里服务 半导体接触器电压控制,与传统的接触器不同,这里的电流可以非常非常平稳地变化。因此不需要变阻器,足够简单 PWM技术 (脉冲宽度调制)。
如果小车需要停下来,那么发动机就会切换到发电机模式,制动基本上是由电枢的磁场提供的,电枢的磁场也是经过调整的,因此几乎可以实现制动,使车辆完全停止。顺便说一句,无轨电车的控制晶体管脉冲电子设备的主要部分位于其车顶。
在停止现代无轨电车的过程中,该系统起作用 能量恢复…这意味着牵引电机在制动过程中以发电机模式产生的能量将返回到接触网络,并且可以重新用于满足从该网络并联供电的电动汽车的需求以及为无轨电车本身的设备供电(液压方向盘、加热系统等)如果无轨电车从箭头下方经过,则 变阻制动.
几乎无轨电车的整个驱动由几个部分组成:
-
成对的受电弓;
-
断路器;
-
IGBT控制单元;
-
监管计划;
-
运动和制动控制器;
-
变阻器块;
-
抑制干扰的扼流圈;
-
平板计算机或切换模块连接到外部计算机。
在面板或外部计算机的帮助下,对无轨电车的牵引电机进行诊断,检查其运行参数,必要时更改设置 微处理器控制器…存储所有运行参数和牵引驱动器的当前状态 数字化.
以下是控制系统的一些模型 漏电流的背后 并有适当的保护系统——自动断开网络连接。可选地,它也可以出现在这里 运动消耗和停止时恢复的能量计数器。
值得一提的是单独 手推车保护电子,这有助于提高乘客的安全。例如,当乘客车门打开或制动系统中没有空气时,无轨电车将不会移动。