反转和停止鼠笼式感应电动机
感应电动机是一种可逆电机。要改变转子的旋转方向,就必须改变磁场的旋转方向(通过将电源线切换到电机两相的端子)— 发动机启动和制动电路
两个旋转方向的机械特性如图 1 所示。 1.
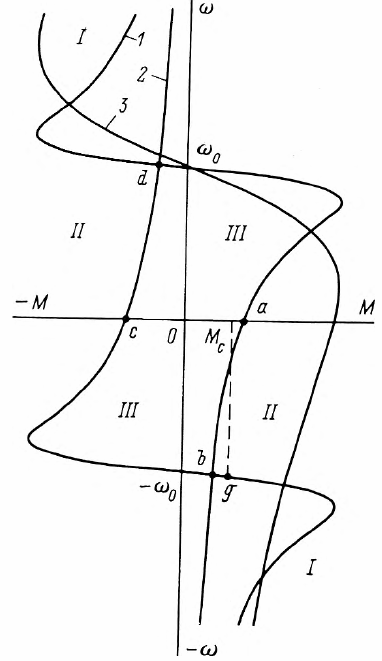
米。 1. 停止模式下可逆运行的感应电机的机械特性系列,能量供应到网络 (I)、反向模式 (II) 和电机 (III) 1、2 — 自然; 3 - 人工。
鼠笼式感应电动机不仅可以用作电动机,还可以用作制动器。在停止模式下,每个电动机始终作为发电机工作。在这种情况下,具有鼠笼式转子的感应电动机可以具有三种制动模式。
在再生制动模式下,机器以负滑差运行。在这种情况下,转子的速度超过了磁场的旋转速度。当然,要切换到这种模式,必须在轴的侧面施加一个外部主动力矩。
反馈方式广泛应用于起重设备中。在下降过程中,推进系统由于负载的势能,可以获得超过磁场旋转速度的速度,下降将发生在机械特性上某一点g对应的平衡状态,当下降负载产生的静态力矩被发动机制动力矩平衡时。
在具有反作用静态扭矩的传统驱动器中,所讨论的模式仅通过特殊的控制电路来实现,这使得降低磁场的旋转速度成为可能。同一图中显示了反馈模式感应电机的机械特性。 1.
如图所示,发电机模式下的最大转矩略高于电动机模式,临界滑差的绝对值相同。
异步发电机本身的范围很窄,即 风力发电厂... 由于风力不是恒定的,因此设备的旋转速度会发生显着变化,因此在这些条件下最好使用异步发电机。
应用最广泛的是制动方式——对立。在两种情况下(图 1),可以向异步电机以及直流电机过渡到这种模式:静转矩显着增加(ab 部分)或将定子绕组切换为不同的旋转方向(节 c)。
在这两种情况下,电机都以大于 1 的滑差运行,直到电流超过启动电流。因此,对于鼠笼式电机,该模式只能用于快速停止驱动器。
当达到零速时,电机必须与电源断开,否则它会向相反方向加速。
对置转子电机制动时,必须在转子电路中引入变阻电阻,以限制电流,增大制动力矩。
也可以 动态制动模式……然而,这会带来一些困难。当电机与电源断开时,机器的磁场也会消失。可以从连接到与交流网络断开的定子的直流电源激励感应电机。电源应在定子绕组中提供接近标称值的电流。由于此电流仅受线圈电阻的限制,因此直流电源电压必须较低(通常为 10 - 12 V)。
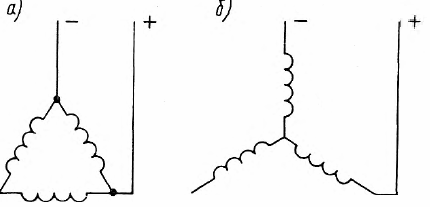
米。 2. 以三角形 (a) 和星形 (b) 连接时,将感应电机的定子连接到动态制动模式下的直流电源
自励磁也用于动态制动。电容器连接到与电源断开的定子。
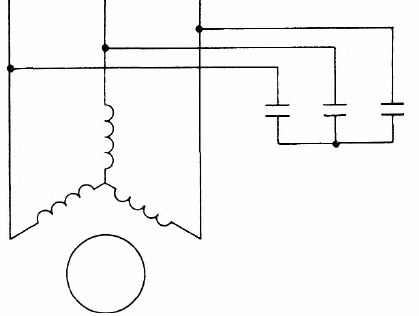
米。 3. 自激感应电机能耗制动示意图
当转子旋转时,由于剩余磁化和流过定子绕组以及电容器的电流,在定子电路中产生 EMF。当定子电路达到一定速度时,就会出现谐振情况:电感电阻的总和将等于电容电阻。机器自激的密集过程将开始,这将导致 EMF 增加。当电机E的电动势与电容器两端的电压降相等时,自激模式结束。
随着容量的增加,最大制动力矩向较低速度移动。所考虑的制动方式的缺点是制动作用只出现在一定的速度区内,低速时需要使用大电容进行制动。
从好的方面来说,不需要额外的电源。这种模式总是在电容器组连接到电机以提高供电网络的功率因数的装置中实施。
另请参阅此主题: 异步电动机的制动电路